
ID : 10261
概要
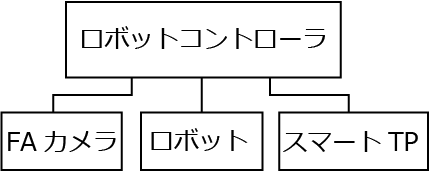
"内蔵視覚"は、ロボットコントローラで画像処理を行う機能です。内蔵視覚を使用すれば、別に視覚コントローラを用意する必要はありません。
下図のように、FAカメラをロボットコントローラに直接接続して使用します。
接続できるFAカメラには次のものがあります。
- USBカメラ
ロボットコントローラのUSBポートにカメラを接続して使用します。
RC9シリーズでは、IDS社製のUSBカメラが使用可能です。
RC9シリーズのUSBポートはUSB2.0のため、USB3.0カメラは非推奨で
す。(USB2.0カメラのみ動作を確認しています。) - GigEカメラ
ロボットコントローラのLANポートにカメラを接続して使用します。
RC9では、Basler社製のGigE対応エリアセンサーカメラ aceシリーズが使用できます。
(GigE:Gigabit Ethernetのこと) - ネットワークカメラ
ロボットコントローラのLANポートにカメラを接続して使用します。
RC9では、Canon社製のネットワークカメラ WebView Livescopeシリーズが使用できます。
ロボット機内配線を利用したカメラ(GigEカメラ)を接続し、外部トリガモードにおいてトリガ誤検知が発生する場合、カメラのパラメータ設定によって誤検知を改善できることがあります。
設定、調整時の構成
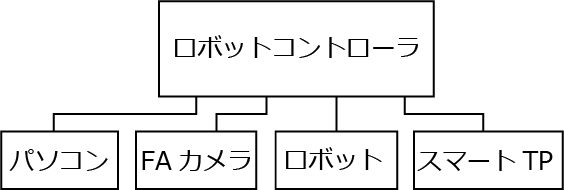
設定、調整時には、PCを利用して処理や画像の確認を行います。
USBカメラの場合
PCをロボットコントローラのLANポートに接続します。
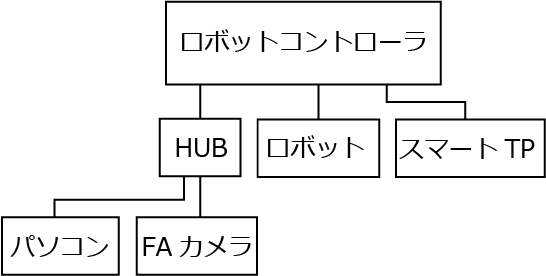
GigEカメラおよびネットワークカメラの場合
ロボットコントローラのLANポートはひとつですので、HUBを経由して、PCとカメラの両方を接続します。設定、調整終了後は、HUBを外して、カメラを直接ロボットコントローラに接続します。
ID : 10261