
ID : 10207
Safety I/Oの配線
ここでは、Safety I/Oの内容について、次の項目に分けて説明しています。
配線表
Safety I/Oケーブルの端子番号と線色の内容は以下の通りです。
|
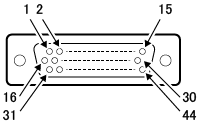
コネクタの端子番号 (コネクタ結合面から見た図) |
|
|---|
| 端子番号 | 名称 | 配線ペア | 線色 |
|---|---|---|---|
| 1 | 外部非常停止入力 1b-1 | ペア | 黒 |
| 31 | 外部非常停止入力 1b-2 | 桃 | |
| 2 | 外部非常停止入力 2b-1 | ペア | 茶 |
| 32 | 外部非常停止入力 2b-2 | 桃 | |
| 3 | 防護停止入力 1-1 | ペア | 赤 |
| 33 | 防護停止入力 1-2 | 桃 | |
| 4 | 防護停止入力 2-1 | ペア | 橙 |
| 34 | 防護停止入力 2-2 | 桃 | |
| 5 | 自動イネーブル入力 1-1 | ペア | 黄 |
| 35 | 自動イネーブル入力 1-2 | 桃 | |
| 6 | 自動イネーブル入力 2-1 | ペア | 緑 |
| 36 | 自動イネーブル入力 2-2 | 桃 | |
| 7 | - | ペア | 青 |
| 37 | - | 桃 | |
| 8 | - | ペア | 黒 |
| 38 | - | 灰 | |
| 9 | - | ペア | 茶 |
| 39 | - | 灰 | |
| 10 | イネーブルスイッチ出力 1-1 | ペア | 赤 |
| 40 | イネーブルスイッチ出力 1-2 | 灰 | |
| 11 | イネーブルスイッチ出力 2-1 | ペア | 橙 |
| 41 | イネーブルスイッチ出力 2-2 | 灰 | |
| 12 | - | ペア | 黄 |
| 42 | - | 灰 | |
| 13 | 非常停止出力 1b-1 | ペア | 緑 |
| 43 | 非常停止出力 1b-2 | 灰 | |
| 14 | 非常停止出力 2b-1 | ペア | 青 |
| 44 | 非常停止出力 2b-2 | 灰 | |
| 15 | - | ペア | 紫 |
| 30 | - | 灰 | |
| 16 | STOモニタ出力1+ | ペア | 黒 |
| 17 | STOモニタ出力1- | 白 | |
| 18 | STOモニタ出力2+ | ペア | 茶 |
| 19 | STOモニタ出力2- | 白 | |
| 20 | STO出力1+ | ペア | 赤 |
| 21 | STO出力1- | 白 | |
| 22 | STO出力2+ | ペア | 橙 |
| 23 | STO出力2- | 白 | |
| 24 | - | ペア | 黄 |
| 25 | - | 白 |
信号の種類
Safety I/Oの信号は、下記の種類があります。
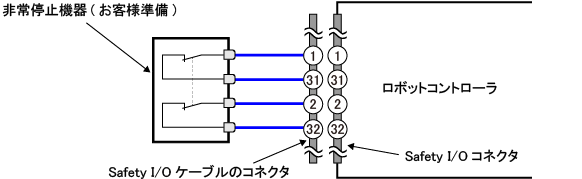
外部非常停止入力
ロボットを停止させるための信号です。
| 端子番号 | 内容 |
|---|---|
| 1と31 (系統1) |
|
| 2と32 (系統2) |
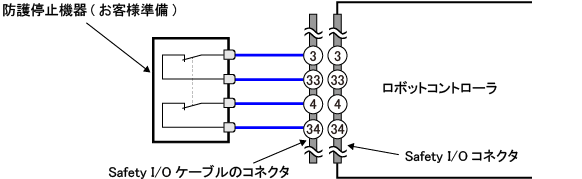
防護停止入力
ロボットを一時停止させるための信号です。
| 端子番号 | 内容 |
|---|---|
| 3と33 (系統1) |
|
| 4と34 (系統2) |
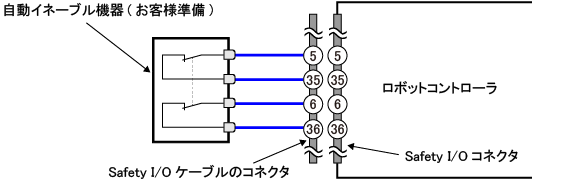
自動イネーブル入力
ロボットコントローラを自動モードにするための信号です。
| 端子番号 | 内容 |
|---|---|
| 5と35 (系統1) |
|
| 6と36 (系統2) |
STOモニタ出力、STO出力
STOの状態を外部機器で知る必要がある場合に使用します。
非常停止出力
非常停止入力の状態を外部機器で知る必要がある場合に使用します。
イネーブルスイッチ出力
イネーブルスイッチの状態を外部機器で知る必要がある場合に使用します。
ID : 10207