
ID : 10198
本体間ケーブルの接続
ロボットコントローラとロボットは本体間ケーブルで接続します。
本体間ケーブルには、動力用とエンコーダ用の2種類があります。
本体間ケーブルの曲げR(内径)は、下記に示す幅を確保してください。過度の曲げは断線の原因となります。ケーブルが動く状態か動かない状態かで、曲げR(内径)の確保幅が異なります。
- 動く状態で使用する場合
- 動力用 220 mm以上
- エンコーダ用 110 mm以上
- 動かない状態で使用する場合
- 動力用 88 mm以上
- エンコーダ用 65 mm以上
ロボット側の接続
ロボットコントローラ側のコネクタがすでに接続されている場合は、ロボットコントローラの電源が切れていることを確認してから作業を行ってください。
本体間ケーブル(動力用)の接続
1
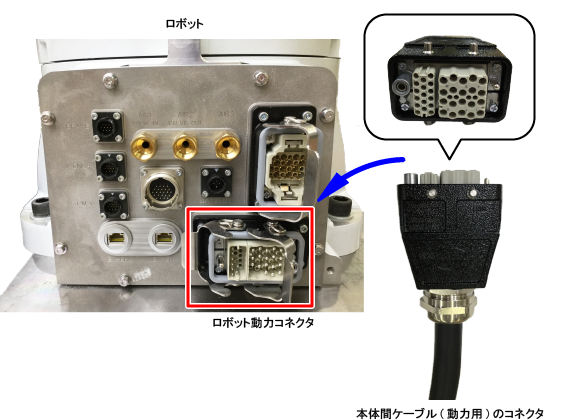
本体間ケーブル(動力用)のコネクタは、片方が黒、もう片方が灰色です。
ロボットと接続するコネクタは黒いコネクタです。
本体間ケーブル(動力用)の黒いコネクタとロボット動力コネクタの左右の向きを合わせます。
逆向きにすると挿入できません。
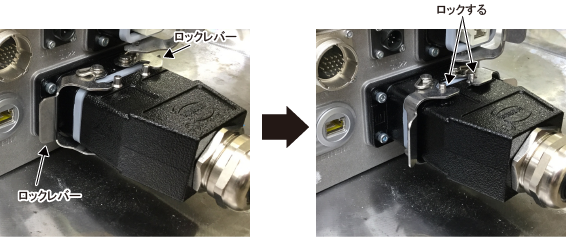
2
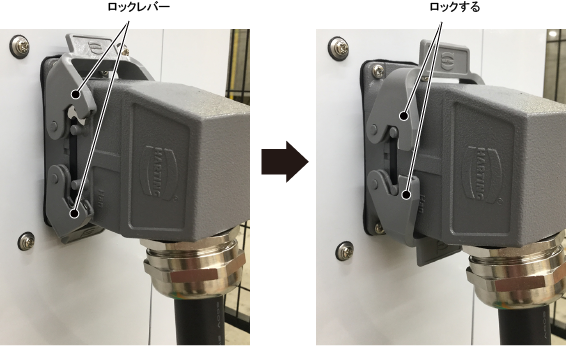
本体間ケーブル(動力用)の黒いコネクタをロボット動力コネクタにまっすぐ挿入し、2つのロックレバーを動かしてロックします。
本体間ケーブル(エンコーダ用)の接続
1
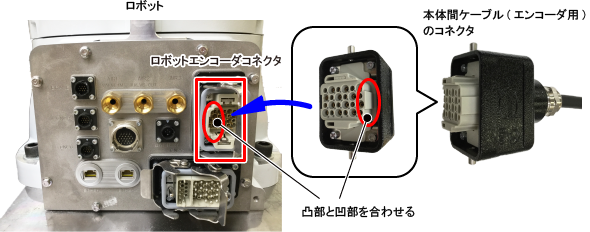
本体間ケーブル(エンコーダ用)のコネクタも、片方が黒、もう片方が灰色です。
ロボットと接続するコネクタは黒いコネクタです。
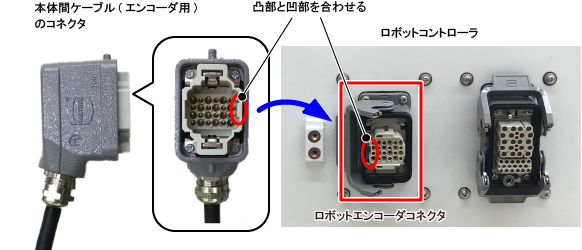
本体間ケーブル(エンコーダ用)の黒いコネクタとロボットエンコーダコネクタの左右の向き(コネクタ内部の凸部と凹部)を合わせます。
逆向きにすると挿入できません。
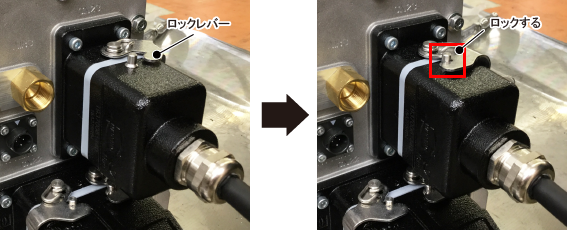
2
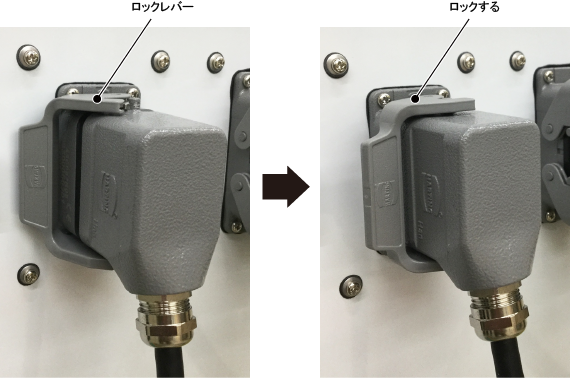
本体間ケーブル(エンコーダ用)の黒いコネクタをロボットエンコーダコネクタにまっすぐ挿入し、ロックレバーを動かしてロックします。
ロボットコントローラ側の接続
ロボットコントローラの電源が切れていることを確認してから作業を行ってください。
本体間ケーブル(動力用)の接続
1
本体間ケーブル(動力用)の灰色のコネクタとロボット動力コネクタの上下の向きを合わせます。
逆向きにすると挿入できません。

2
本体間ケーブル(動力用)の灰色のコネクタをロボット動力コネクタにまっすぐ挿入し、2つのロックレバーを動かしてロックします。
本体間ケーブル(エンコーダ用)の接続
1
本体間ケーブル(エンコーダ用)の灰色のコネクタとロボットエンコーダコネクタの上下の向きを合わせます。
逆向きにすると挿入できません。
2
本体間ケーブル(エンコーダ用)の灰色のコネクタをロボットエンコーダコネクタにまっすぐ挿入し、ロックレバーを動かしてロックします。
ID : 10198