
ID : 10078
オンラインモニタの準備
コンピュータ上に作成したプログラムを起動し、ロボットコントローラにアップロードします。
コンピュータの画面でロボット動作をシミュレートするため、スマートTPでマシンロック状態にします。
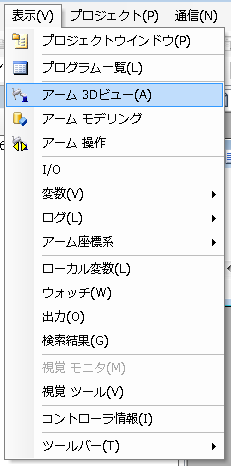
アーム3Dビューを開く
ロボットのシミュレーション画像を表示するためにアーム3Dビューを開きます。
[表示(V)] - [アーム 3Dビュー(A)]を選択すると[アーム 3Dビュー]ウインドウが表示されます。
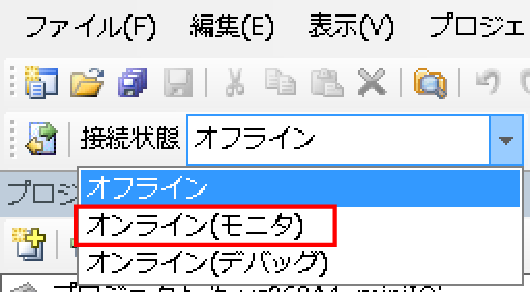
WINCAPSIIIをモニタモードにする
WINCAPSIIIの接続状態を[オンライン(モニタ)]にします。
マシンロック状態にする
ロボットコントローラをマシンロック状態にします。
これによって、ロボットを実際には動作させずにプログラムを実行してシミュレーションができます。
マシンロックするときは、モータ電源が切られた状態であることを確認してください。
マシンロックをした場合I/Oの出力を制限することができます。詳細については、スマートTP操作ガイドの "I/Oの補助機能メニューの表示" を参照してください。
I/O出力制限の状態によりステータスバーのアイコンが変化します。
 : I/O出力制限無し
: I/O出力制限無し  : I/O出力制限あり
: I/O出力制限あり
ID : 10078