
ID : 9731
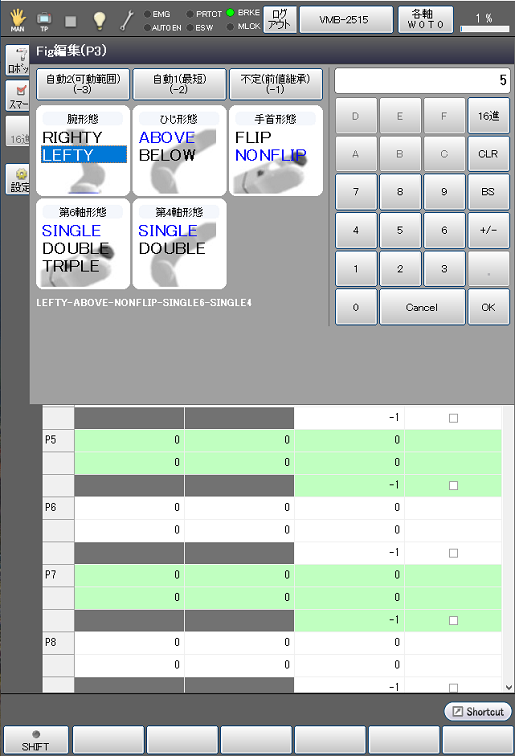
ロボットの動作形態(Fig)の表示と設定
操作経路 : [F3 変数] - [T型、P型のFig要素を選択] - [F5 編集]
T型、P型の各変数において、ロボットの動作形態(Fig)を設定することができます。
Figの設定には、次の5つの設定方法があります。
- [腕形態]、[ひじ形態]、[手首形態]、[第6軸形態]、[第4軸形態]、[第1軸形態]をそれぞれ個別に選択して設定する。
- テンキーでFigの形態番号を入力して設定する。
- [自動2(可動範囲)(-3)]キーを押して、動作可能なFig値を自動的に選択して使用するように設定する。
- [自動1(最短)(-2)]キーを押して、最短距離となるFig値を自動的に選択して使用するように設定する。
- [不定(前値継承)(-1)]キーを押して、直前の移動で使用したFig値を使用するように設定する。
| 使用可能なキー | |
|---|---|
| [形態選択] |
画面を直接タッチして、[腕形態]、[ひじ形態]、[手首形態]、[第6軸形態]、[第4軸形態]、[第1軸形態]をそれぞれ個別に設定します。 |
| [テンキー] |
Figの形態番号からFigの設定を行います。 テンキーを使用してFigの形態番号を入力し、[OK]を押すと設定できます。 |
| [自動2(可動範囲)(-3)キー] | 動作可能なFig値を自動選択します。(*1) |
| [自動1(最短)(-2)キー] | 最短距離となるFig値を自動選択します。(*1) |
| [不定(前値継承)(-1)キー] | 直前の移動で使用したFig値を使用するよう設定します。(*1) |
(*1) : 詳細は、各機能の詳細説明の "最適Fig自動選択機能(Auto Fig)" を参照してください。
ID : 9731