
ID : 9730
変数指定移動の操作(J型、T型、P型のみ対応)
操作経路 : [F3 変数] - [F4 移動]
J型、T型、P型の変数において、変数番号を指定して、その指定した変数番号に登録されている座標値にロボットを手動で動かします。
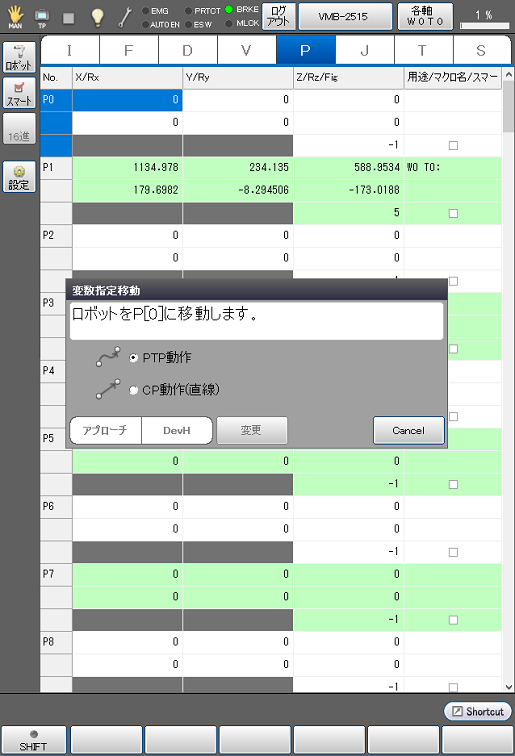
ロボット移動先の座標値が登録されている変数番号を指定し、[F4 移動]を押すと、次のような[変数指定移動]ウィンドウが表示されます。
目標の座標値までロボットを動かす上で、[PTP動作]で移動するのか、[CP動作(直線)]で移動するのかを選択します。
その後、イネーブルスイッチを押してモータ電源が入ったことを確認し、ロボットの動作速度を設定してスマートTPの[FWD]キーを押し続けます。
ロボットが目標の座標に到達する前に[FWD]キーを離すと、ロボットは停止します。 途中で停止した場合、同じ操作手順を行うことで、停止した地点から、続けて目標の場所までロボットを動かすことができます。
アプローチ動作またはオフセット位置に動作させることもできます。
[アプローチ]ボタンでアプローチ距離を指定すると、ロボットが指定したアプローチ長の位置に移動します。[DevH]ボタンで座標(X、,Y、Z、Rx、Ry、Rz)を指定すると、ロボットが変数位置から指定した座標分オフセットした位置に移動します。
アプローチ距離、あるいは座標(X、,Y、Z、Rx、Ry、Rz)が既に設定してある場合は、[変更]ボタンで値を変更することができます。
ID : 9730