
ID : 9703
エリアの表示と設定
操作経路 : [F2 アーム] - [F6 補助機能] - [F5 エリア]
エリアの設定を行います。
エリアは最大32個まで登録できます。
主に、ロボットと他設備との干渉チェックを行う領域を設定するのに用いられます。
[F5 エリア]を押すと、次のような[エリア設定]画面が表示されます。
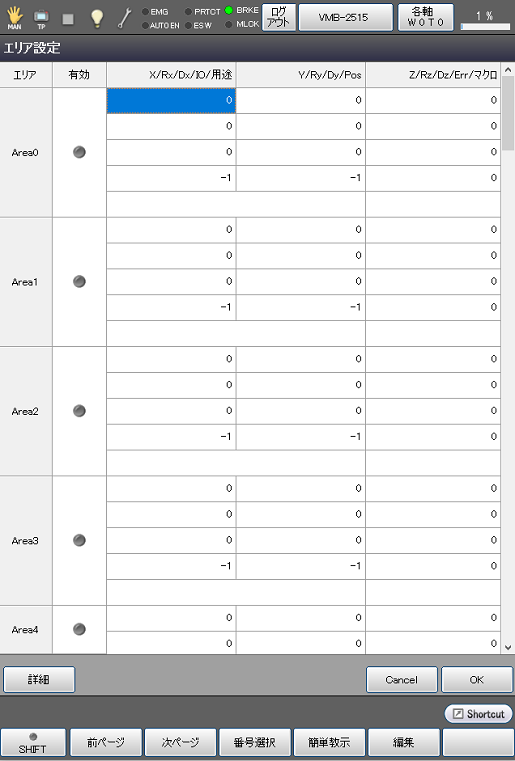
設定できるのは下記の項目です。各項目は、該当のセルを選択し、[F5 編集]ボタンを押すと設定ができます。([有効]を除く)
| セル | 設定内容 |
|---|---|
| 有効 | エリア機能の有効/無効を切替えます。 エリア機能が無効の場合はインジケータがグレーになっており、有効にすると緑色になります。 無効のときにセルを選択すると、有効に設定する画面が開き、有効のときにセルを選択すると、無効に設定する画面が開きます。[OK]を押すと状態が切替り、[Cancel]を押すと元の状態のままになります。 |
| X、Y、Z、Rx、Ry、Rz | エリアの中心点の位置と回転(傾き)を指定します。 Areaコマンドの "中心" に該当します。 |
| DX、Dy、Dz | エリアの大きさを指定します。入力するのは、エリアの中心から最大点までのベクトルの各要素です。 Areaコマンドの "大きさ" に該当します。 |
| IO | 検出時に信号出力するI/Oのポート番号を指定します。I/O出力をしない場合は"-1"を指定します。存在しないポート番号や出力信号を出せないI/Oポート番号を指定することはできません。 Areaコマンドの "I/O番号" に該当します。 |
| Pos | 検出位置を格納するときのポジション型グローバル変数のインデックス番号を指定します。検出位置を格納しない場合は"-1"を指定します。 Areaコマンドの "格納変数番号" に該当します。 |
| Err | 検出方法とエラー出力を指定します。 [F5 編集]ボタンを押すと選択画面が表示されますので、該当するものを選択し、[OK]ボタンを押します。選択肢については、各機能の詳細説明の "エリア検出時エラー検出の設定" を参照してください。 Areaコマンドの "エラー検出設定" に該当します。 |
| ファンクションキー以外のキー | |
|---|---|
| [詳細] |
[エリア詳細設定]画面が表示されます。 |
| 使用可能なファンクションキー | |
|---|---|
| [F1 前ページ] | 現在表示されているエリアの直前のページに移動します。 |
| [F2 次ページ] | 現在表示されているエリアの直後のページに移動します。 |
| [F3 番号選択] |
テンキーが表示されます。 テンキーを使用して選択したいエリアの番号を入力し、[OK]を押すと、指定した番号のエリアが選択されます。 |
| [F4 簡単教示] | 1つのワーク座標と2箇所のロボットで教示して登録した位置座標(P型変数)を指定することでエリアを設定します。 |
| [F5 編集] |
変更したいエリア番号と座標要素を選択し、[編集]を押すと、テンキーが表示されます。 テンキーを使用して設定したい値を入力し、テンキー上の[OK]を押すと、値が変更されます。 |
| [F7 詳細] |
[エリア詳細設定]画面が表示されます。 エリアの検出にかかわる設定を行います。 |
ID : 9703
- このページに関連する情報
- 簡単教示によるエリア座標の設定
- エリア詳細設定の表示と変更