
ID : 5926
画像処理アプリケーション
RC8シリーズでは接続したカメラを用いて、画像処理アプリケーションを使用することができます。使用可能なアプリケーションは、"EVP"、"EVP2"、"EIS"、"QRコード位置補正"です。
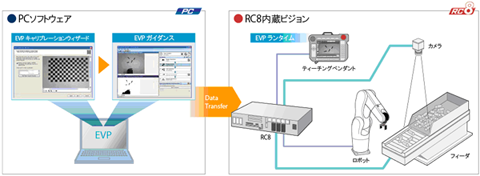
- EVP : ピック&プレイスの画像処理を行います。
- EVP2 : ピック&プレイスの画像処理を行います。EVPの簡単な操作性はそのままに、機能の拡充・数倍の処理能力向上を実現しました。
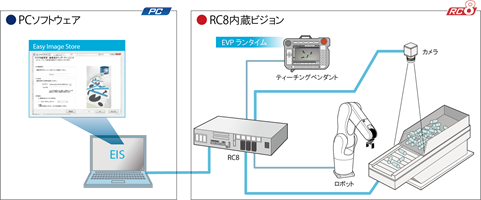
- EIS : 接続しているカメラの画像をPCに自動保存します。
- QRコード位置補正: QRコード位置決めマーカプレートを認識し、ロボットの位置補正を行います。
"EVP"、"EVP2"および"EIS"のアプリケーションは「RC Vision」ソフトウェアパッケージに含まれています。
詳細は各アプリケーションのマニュアルを参照してください。
| アプリケーション | 内容 |
|---|---|
| EVP |
EVPは、RC8シリーズ(デンソーロボットコントローラ)の内蔵視覚ライブラリ(Denso Robot Imaging Library)を用いてピック&プレイスの画像処理を行う画像処理アプリケーションです。EVPを使用することで、プログラミングすることなく、必要なパラメータを設定することができます。 EVPを使用するには、下記の各ライセンスの登録が必要です。ライセンスがない場合は、別途、ご購入ください。
|
| EVP2 | EVP2は、ロボットが視覚による位置補正を行うための画像処理を、プログラムレスで設定できるソフトウェアです。EVPの簡単な操作性はそのままに、機能の拡充・数倍の処理能力向上を実現しました。 コントローラに接続されたカメラを用いて画像を処理します。画像処理の設定は、PCのアプリケーションであるEVP2ガイダンスを使用し、画像処理実行時には、コントローラとコントローラに接続されたカメラのみで実施します。 視覚によるロボットの位置補正を行うためには、カメラとロボット間のキャリブレーションが必要です。EVP2ではキャリブレーションウィザードで、このキャリブレーションを実施します。 さらに、EVP2は、視野内のワーク配置状態を出力する機能も備えており、フィーダなどのお客様手配の機器によるワークの移動を制御することができます。 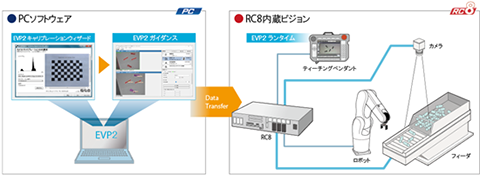
EVP2は、Ver.2.11.*以降の、コントローラ型式のエンジンボードがEのタイプの場合に使用できます。 コントローラの型式については、"コントローラ型式"を参照してください。 EVP2を使⽤するには、下記のライセンスの登録が必要です。ライセンスがない場合は、別途、ご購⼊ください。
|
| EIS | EISは、RC8シリーズに接続されたカメラの画像をPCに保存できるソフトウェアです。RC8シリーズの内蔵視覚(EVPなど)で撮影された画像はRC8シリーズ内に一時的に保存され、電源を切ることでリセットされますが、EISを使用すると、PC内に画像ファイルとして自動保存することができます。
EISを使用するには、下記のライセンスの登録が必要です。ライセンスがない場合は、別途、ご購入ください。
|
| QRコード位置補正 |
QRコード位置補正は、QRコード位置決めマーカプレート (以下、マーカ) を基準とした、位置補正を行う画像処理アプリケーションです。 QRコード位置補正を使用することで、マーカを基準としたロボットの教示を行うことができます。QRコード位置補正を使用するには、事前にカメラとロボット間のキャリブレーションを実施する必要がありま 使用方法などの詳細は、"QRコードキャリブレーションプロバイダのマニュアル"を参照してください。 QRコード位置補正で使用するマーカは、こちらのPDFをご使用くださ QRコード位置補正を使用するには、下記のライセンスの登録が必要です。ライセンスがない場合は、別途、ご購入ください。
|
下記URLから、デンソーウェーブロボットHPへアクセスすると「RC Vision」をダウンロードできます。
評価用ライセンスキーを登録することでライセンスをお持ちでない方でも、画像処理アプリケーションをお試しいただけます (試用期間:3ヶ月)。
ダウンロード及びライセンスの取得には会員登録が必要です。
https://www.denso-wave.com/ja/robot/product/software/RCVision.html
ID : 5926