
ID : 3394
Pylon5の設定方法
Basler社のGigEカメラの設定方法を説明します。
pylon IP Configuratorを使用し、IPアドレスおよびIDの設定と、トリガモードの設定を行います。
カメラはトリガモードで使用してください。
トリガモードOFFの場合、カメラに接続できません。
インストール方法
1
Basler 社のWebサイトより、"Windows 用ソフトウェアスイートPylon 5.0.12" をダウンロードします。
2
ダウンロードした "Basler_pylon_5.0.12.11830.exe" をダブルクリックします。
3
下図の画面が開くので、"I agree" にチェックを入れ、"Next" ボタンをクリックします。
以下のすべてのステップにおいて、"Cancel" ボタンをクリックした場合は、インストールを中止します。
4
"Custom" を選択し "Next" ボタンをクリックします。
5
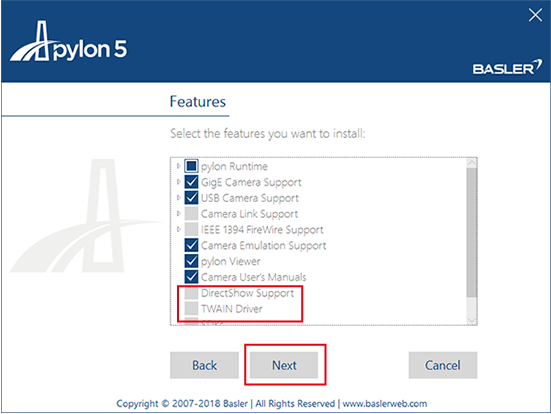
デフォルトでチェックされている機能の中から "DirectShow Support"、"TWAIN Drive"、"Firmware Updater" のチェックを外し、"Next" ボタンをクリックします。
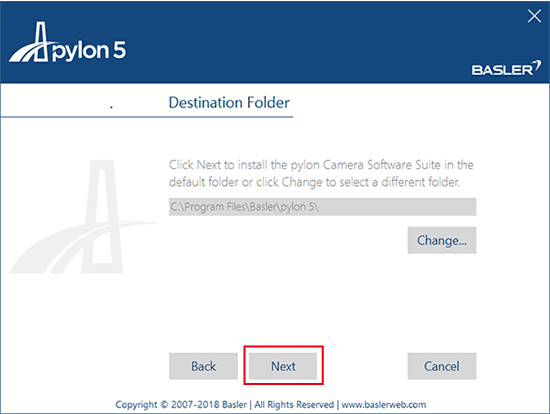
6
インストール先ディレクトリを確認して、"Next" ボタンをクリックします。
"Change" ボタンをクリックすると、インストール先ディレクトリを変更することができます。
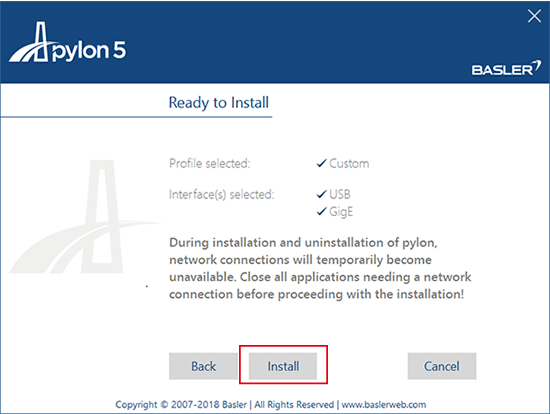
7
"Install" ボタンをクリックすると、インストールを開始します。
IPアドレス、IDの設定
1
pylon IP Configuratorを起動します。
2
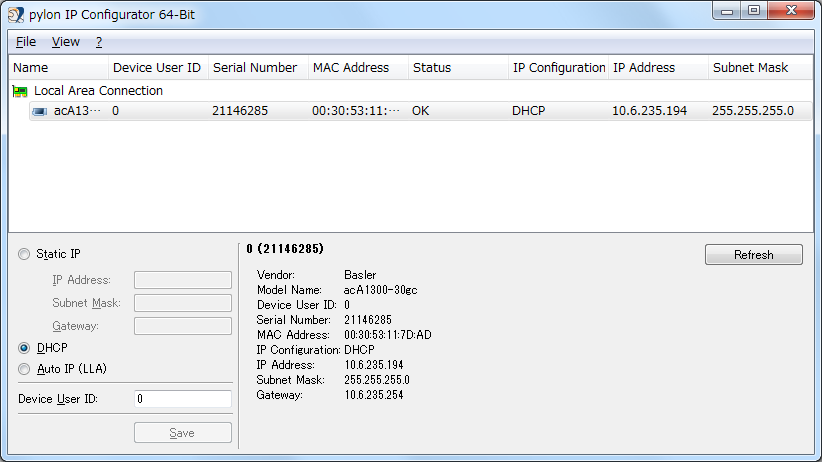
IPアドレス、IDを設定するカメラを選択します。
3
「IPアドレス」、「サブネットマスク」、「ゲートウェイ」、「Device User ID」を入力し、[save] ボタンを押します。
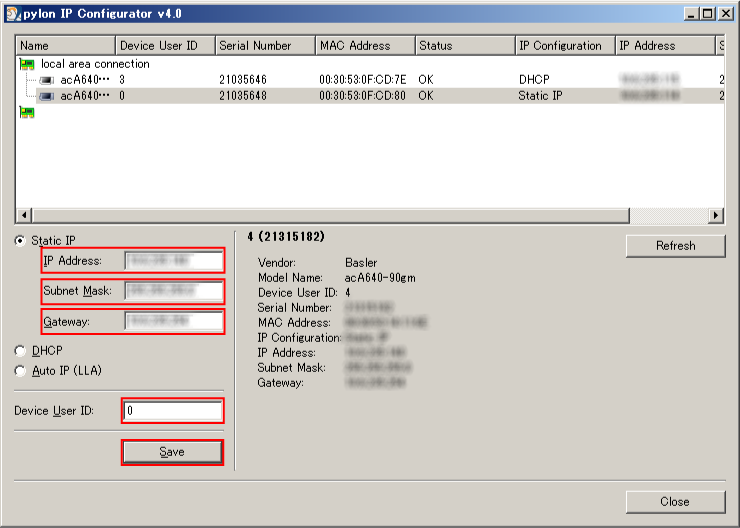
Device User IDの範囲は0~4です。
User ID 0~4はコントローラのイメージ格納領域のID 201~205に対応しています。
カメラを複数台使用する時は、IDを重複して設定しないでください。
トリガモードの設定
1
pylon Viewerを起動します。
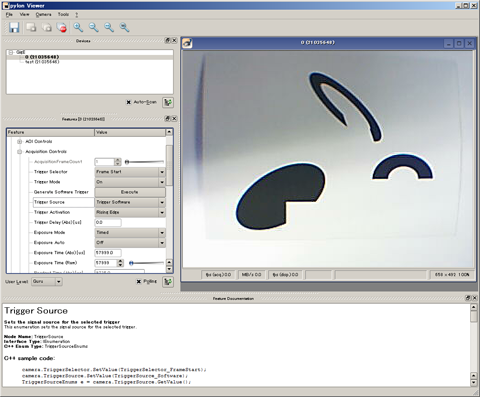
2
「User Level」を [Expert] 以上にします。
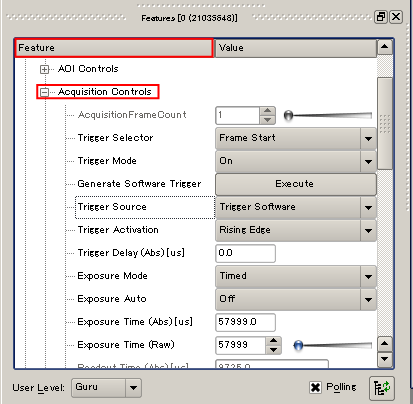
3
「Feature」の中の「Acquisition Controls」を選択し、+をクリックしてメニューを開きます。
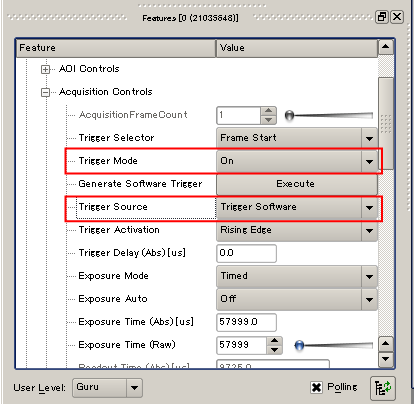
4
「Trigger Mode」を "On" にします。
使用するモードに応じて「Trigger Source」を選択します。
| 項目名 | 内容 |
|---|---|
| Trigger Software | ソフトトリガ |
| Line* | 外部トリガ (ハードトリガ) |
Trigger ModeをOffにすると、以下のトラブルにつながる場合があります。
- カメラに接続できない。
- ロボットコントローラのCPUやネットワークに過剰な負荷がかかる。
5
その他の使用条件 (シャッター、スピード、ゲインなど) を設定します。
ビジョントラッキングを行う場合は、"ビジョントラッキングの設定方法" に従って設定してください。
6
「Configuration Set Selector」で設定を保存するセットを選択します。
「User Set Save」の [xecute] を押して設定した条件を保存します。
この操作を行わないと、カメラの設定は保存されません。
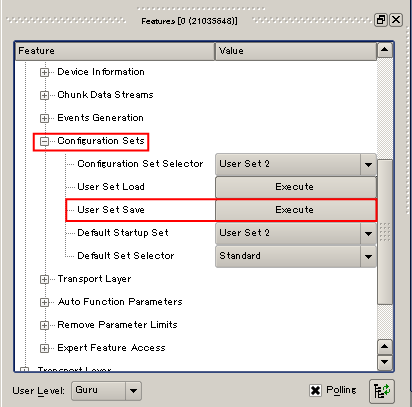
カメラの電源を入れたときは、「Default Startup Set」で指定されたセット (上図では「User Set2」) の設定で立ち上がります。
Pylonプロバイダの設定方法
Pylon5をインストールしたPCでORiNまたはRCVisionを使用してBaslerカメラに接続するための設定方法を説明します。
1
コマンドプロンプトを管理者権限で起動し、以下のコマンドを実行します。
regsvr32 "C:\ORiN2\CAO\ProviderLib\Basler\Pylon5\GigE\Bin\CaoProvPylon5GigE.dll"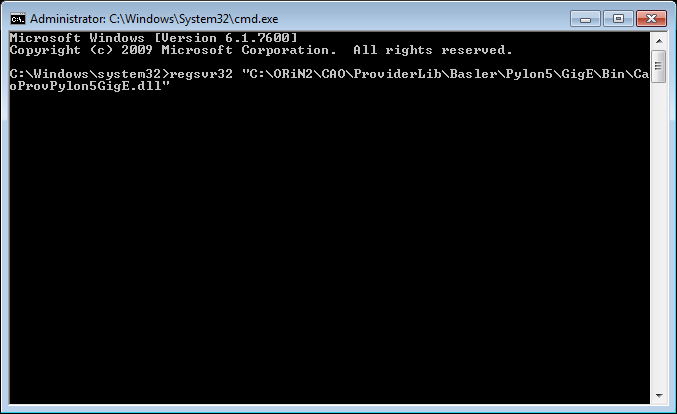
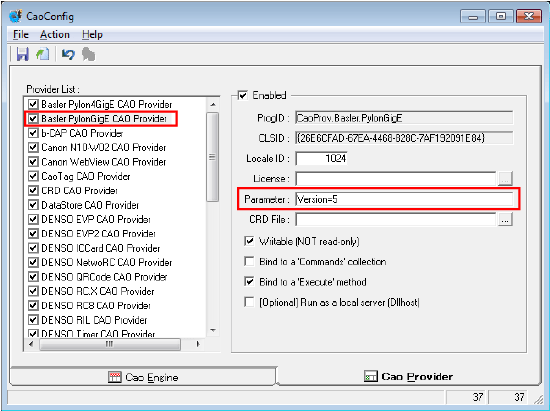
2
スタートメニューから "CaoConfig" を起動し、[Cao Provider] タブの [Provider List] から [Basler PylonGigE CAO Provider] を選択します。
プロバイダのパラメータに "Version=5" と入力し、[File] メニューの [Save] を選択し設定を保存します。
操作経路 : スタートメニュー - [ORiN 2] - [CAO] - CaoConfig
ロボットコントローラにカメラを認識させる
ロボットコントローラに自動でカメラを認識させたい場合は、ロボットコントローラの電源を入れる前に、カメラに電原供給をしてください。ロボットコントローラがカメラより先に起動していると自動でカメラを認識できません。
すでにロボットコントローラが起動している場合など、自動でカメラが認識されないときは手動で認識させてください。操作手順を下記に示します。
- 内蔵視覚メニューの [F6 切断] を押し、内蔵視覚機能を終了します。
- [F6 切断] が [F6 接続] に切り替わります。[F6 接続] を押し、カメラを認識させます。
詳しくは "内蔵視覚の表示・操作" を参照してください。
カメラ画像が取得できない場合
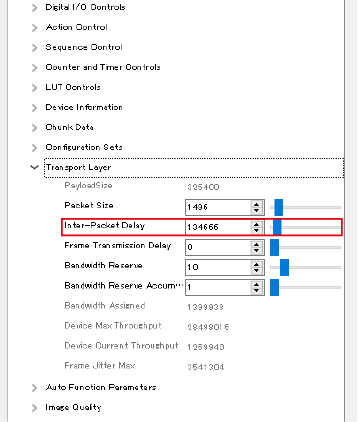
Basler社のGigEカメラを使用している際に、内蔵視覚画面などで画像が取得できない場合は、pylon Viewerで「Inter-Packet Delay」の設定値を現在の値よりも大きく設定することで改善することがあります。
設定を変更する場合は、「Inter-Packet Delay」の値を必要以上に大きく設定しないでください。
「Inter-Packet Delay」の設定値を大きくすると、カメラからのデータ転送が遅くなり、フレームレートの低下が発生することがあります。
1
「Feature」の中の「Transport Layer」を選択してメニューを開きます。
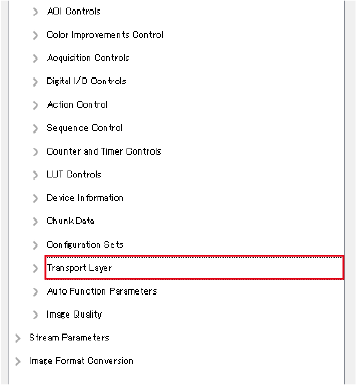
2
表示されるパラメータにある「Inter-Packet Delay」の値を現在の値より大きい値に設定します。
ID : 3394
- このページに関連する情報
- ビジョントラッキングの設定方法