
ID : 2963
ロボットコントローラの設定
ティーチングペンダントにより、ロボットコントローラの設定をします。
設定変更後、ロボットコントローラを再起動することで設定が反映されます。
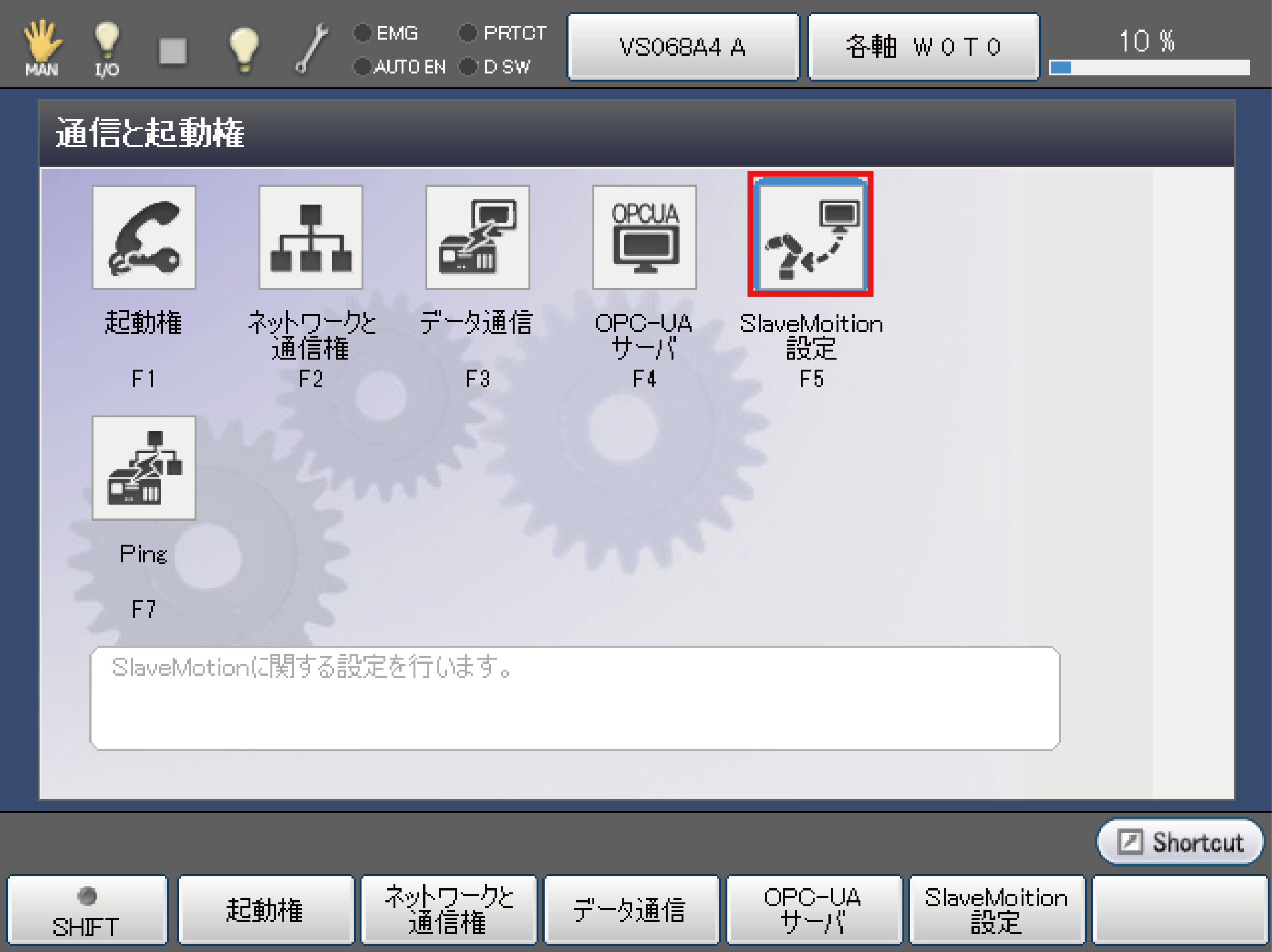
操作経路:基本画面 - [F6 設定] - [F5 通信と起動権] - [F5 SlaveMotion設定]
[F5 SlaveMotion設定] の編集が行えるのは、メンテナでログインした場合のみです。
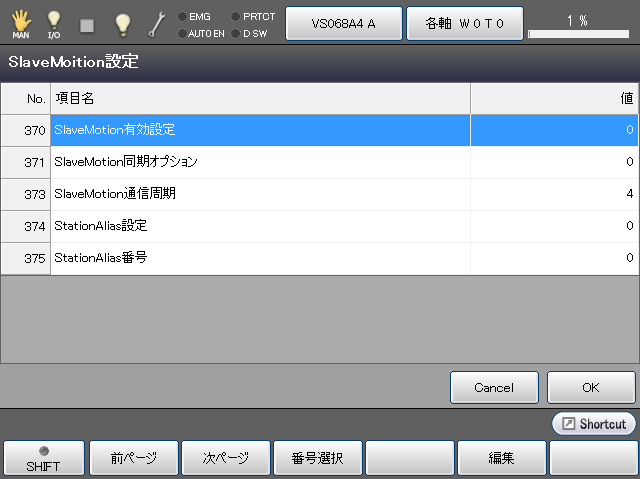
| 項目名 | 設定範囲 | 初期値 | 内容 |
|---|---|---|---|
| SlaveMotion有効設定 | 0~1 | 0 | SlaveMotionの有効設定、通信プロトコルの選択ができます。 0:SlaveMotion無効 1:SlaveMotion有効(EtherCAT) |
| SlaveMotion同期オプション | 0~1 | 0 | EtherCATマスタ機器が指令値の更新を通知することで、通信遅延等による同期ずれに起因した速度過大や加速度過大エラーの発生を軽減することができます。「1:通知有効」を選択した場合、EtherCATマスタから指令値更新の通知を行ってください。更新の通知はControlwordのビット5、ビット6を使用します。詳しくは「デバイス制御の項目を参照してください。 0:通知無効 1:通知有効 |
| SlaveMotion通信周期 | 1、2、4、8、16、32 | 4 | 通信周期が選択できます。[1: 250 us] または [2: 500 us] に設定する場合は「SlaveMotion同期オプション」を「1:通知有効」に設定し、EtherCATマスタから指令値更新の通知を行ってください。その他の通信周期を選択したとき、指令速度過大エラーや指令加速度過大エラーが発生する場合には、「SlaveMotion同期オプション」を「1:通知有効」にすると、エラーの発生を軽減することができます。更新の通知はControlwordのビット5、ビット6を使用します。詳しくは「デバイス制御」の項目を参照してください。 1 :250us 2 :500us 4 :1ms 8 :2ms 16:4ms 32:8ms |
| StationAlias設定 | 0~2 | 0 | 起動時にEtherCATスレーブデバイスのStation Aliasへ書き込む方式を選択できます。「0:RC8」を選択した場合、下記の「Station Alias番号」が使用されます。「1:EEPROM」を選択した場合、EtherCATスレーブボード(Motion)に搭載されたEEPROMに書き込まれた値が使用されます。EEPROMはEtherCATマスタデバイスから読み書き可能です。 「2:Unused」を選択した場合、Station Aliasの値は0になります。 0:RC8 1:EEPROM 2:Unused |
| StationAlias番号 | 0~65535 | 0 | 「Station Alias設定」が「0:RC8」の場合,起動時にこの設定値がStation Aliasの値として書き込まれます。 |
ID : 2963