
ID : 2958
概要
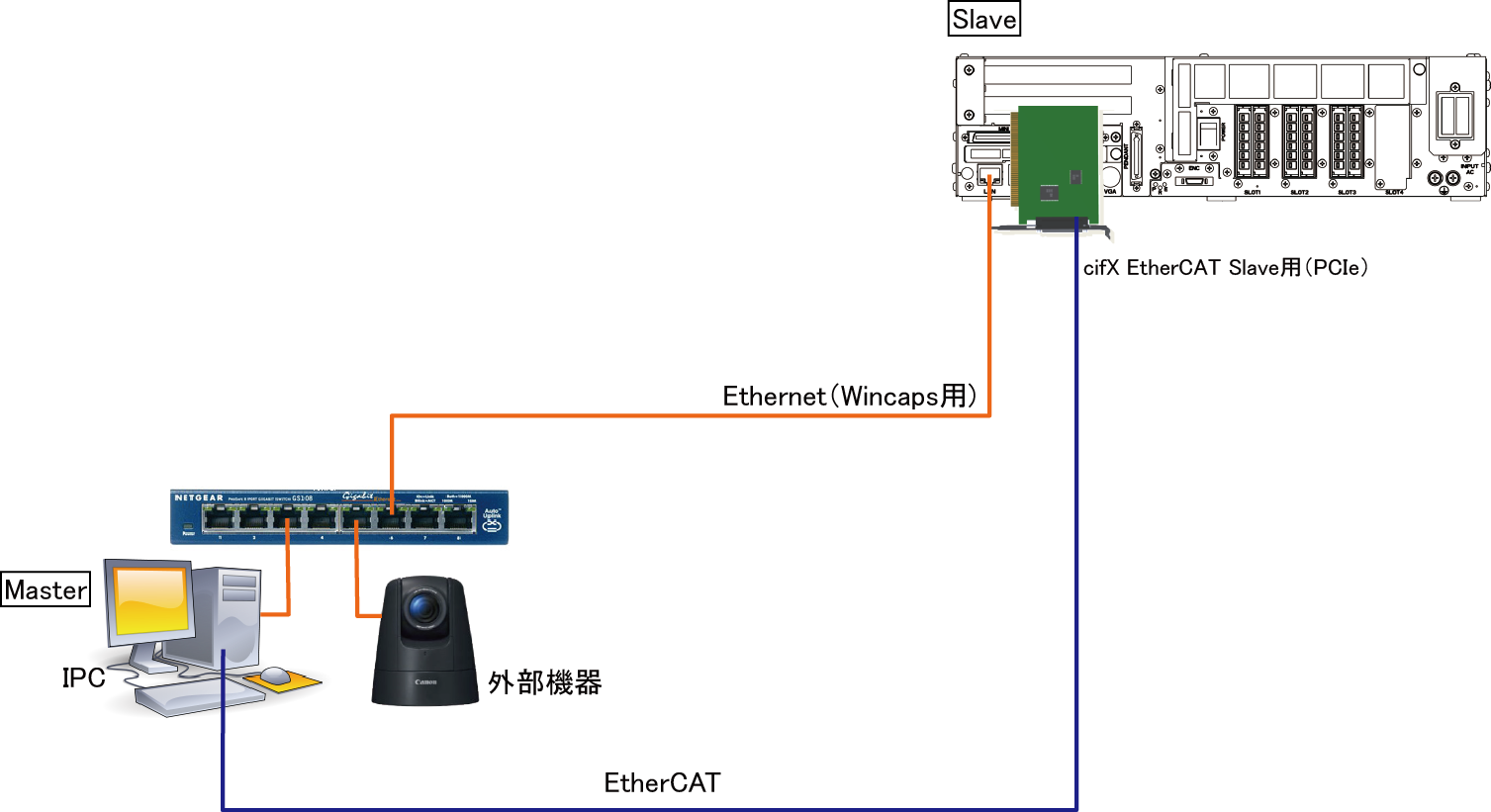
ロボットの軌道生成はEtherCAT Masterを搭載したIPCでユーザが行い、EtherCAT通信を使って、SlaveとなるRC8シリーズコントローラ(以降 RC8シリーズ)に送信すると、 RC8シリーズがその位置指令値どおりにロボットを動作させる機能です。
この機能はVer.2.2.*以降で有効です。
EtherCAT 通信を行うために RC8シリーズのPCIeスロットにEtherCATスレーブボード(Motion)を増設する必要があります。機能を有効にするためには、ロボットコントローラの設定にて[SlaveMotion有効設定]を有効にしてください。
EtherCATスレーブボード(Motion)は、EtherCATスレーブボードと同じです。
EtherCATスレーブボード(Motion)の詳細については、「EtherCATスレーブボード取扱説明書」および「コントローラ関連オプション」を参照してください。
「EtherCAT Slave Motion」ライセンスの詳細については、「オプション機能とライセンス」を参照してください。
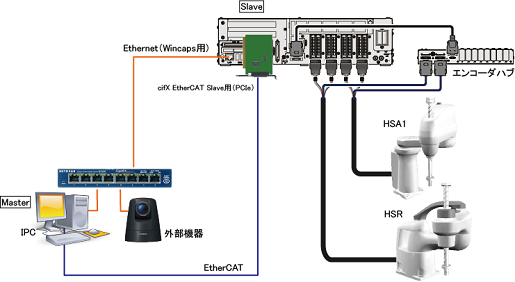
デュアルアーム制御オプション
デュアルアーム機能が使用できるロボットコントローラへ、EtherCAT Slave Motion機能を設定することで、Slaveとなる1台のRC8シリーズから、2台のロボットを動作させる事ができます。
デュアルアーム制御オプションは以下のロボットの組み合わせの場合のみ使用可能です。デュアルアーム機能の詳細については、デュアルアーム制御機能取扱説明書をご覧ください。
デュアルアーム制御オプションは、Ver.2.21.2以降で有効です。
| ロボットの組合せ |
|---|
| HSRロボット × 2 |
| HSA1ロボット × 2 |
| HSRロボット + HSA1ロボット |
構成例
デュアルアーム制御オプション使用時
ID : 2958