
ID : 2697
制御ログを記録する
原点復帰ガイダンス機能は、ロボットが周辺機器などに干渉しないように自動運転中の制御ログを参照して軌道を生成します。そのため、原点復帰動作をする前に、原点復帰位置やログを記録しておく必要があります。
PacScriptのコマンド "SysLog.Ctrl.Start" で制御ログの記録を開始します。また "SysLog.Ctrl.Stop" で制御ログの記録を停止します。
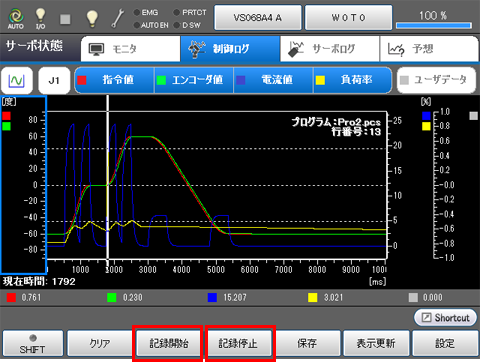
ティーチングペンダントを使用する場合は、制御ログタブの[記録開始]、[記録停止]で制御ログの記録を行います。
ログデータ対象の詳細は、"プログラムコマンドでの記録" を参照してください。
SysLog.Ctrl.Start
制御ログに記録を開始します。コマンド使用前に、制御ログのクリアを行ってください。
記録可能時間経過後は古い記録から上書きされます。
コマンドの詳細は、コマンドリファレンスの "SysLog.Ctrl.Start" を参照してください。
バッファサイズを超えた場合
制御ログの記録可能時間の上限を超える場合は、古い記録から上書きされます。
場合によっては、設定した原点復帰位置までの制御ログが途中から消えてしまうこともあります。その場合は、指定した原点復帰位置までの制御ログの中で一番古い記録の点が実際の復帰位置になります。
SysLog.Ctrl.Stop
制御ログへの記録を停止します。
コマンドの詳細は、コマンドリファレンスの "SysLog.Ctrl.Stop" を参照してください。
ティーチングペンダントを使用する場合
下記の操作経路で制御ログの記録を行うことができます。
操作経路:[F2 アーム] - [F3 サーボ状態] - [制御ログ タブ]
| 使用可能なファンクションキー | |
|---|---|
| [F2 記録開始] |
制御ログの取得を開始します。 制御ログの取得が開始されると、制御ログタブのアイコンの上にRECが点灯します。 |
| [F3 記録停止] |
制御ログの取得を終了します。 制御ログの取得を終了すると、制御ログタブのアイコンの上のRECは消灯します。 |
ID : 2697