
ID : 2676
作業動作の目標位置チェック
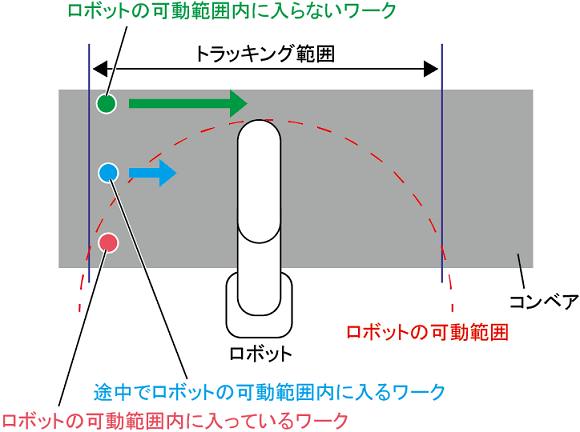
トラッキング動作を開始する際に、作業動作の目標位置がロボットの可動範囲外の場合、エラーが発生します。 TrackCurMotionRangeコマンドを使用することで、作業動作の目標位置がロボットの可動範囲内に入っているかをチェックすることができます。
しかし、下図のように一度もロボットの可動範囲内に目標位置が入らない場合もあります。
TrackMotionRangeコマンドで、トラッキング範囲内にトラッキング対象ワークがいた際における作業動作の目標位置の軌道上に、ロボットの可動範囲内に入る点があるかどうかをチェックすることができます。
これらのコマンドはVer.2.11.*から有効です。
作業動作の目標位置
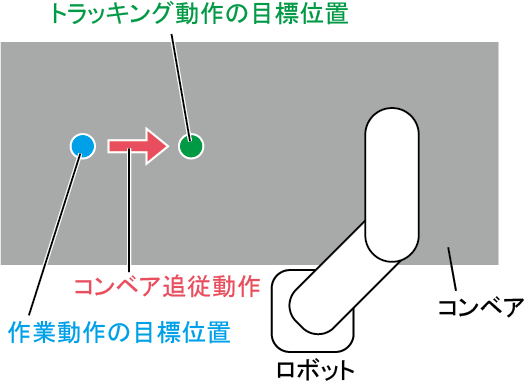
作業動作の目標位置とは、トラッキング動作開始時にコンベアが停止していると仮定して計算される、
”トラッキング対象ワークをピックアップする位置” や ”ピックアップしたワークを供給する位置” のことです。
実際にはコンベアは動作しているため、作業動作の目標位置からコンベア追従動作を合成した位置が、トラッキング動作の目標位置となります。
ID : 2676