
ID : 1220
MC_WriteSafePosVar
ロボットコントローラにSafetyP型変数を書き込みます。
| グラフィック表示 | FB番号 | FBカテゴリ |
|---|---|---|
|
FB2170 | 非動作 |
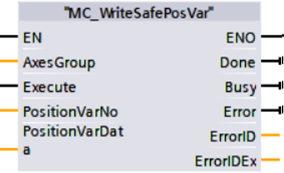
入力変数
| パラメータ名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| AxesGroup | Int | 1以上 | 1 | 不可 |
|
||||
| Execute | Bool |
|
False | 不可 |
|
||||
| PositionVarNo | Int | 0以上 | 0 | 可能 |
|
||||
| PositionVarData | eRC_Position | 可能 | ||
|
||||
出力変数
| パラメータ名 | データ型 / 説明 |
|---|---|
| Done | Bool |
|
|
| Busy | Bool |
|
|
| Error | Bool |
|
|
| ErrorID | Word |
|
|
| ErrorIDEx | DWord |
|
機能説明
-
注意事項
このFBを実行する際は、必ず作業者の操作を伴うようにしてください。
例えば、操作盤のボタンを作業者が押したとき、このFBが実行されるようにします。
変数を変更した場合、必ずセーフティパラメータ送信を行ってください。
WINCAPSIIIを使用してパラメータ受信を行った後にセーフティパラメータ送信を行ってください。
COBOTTA PRO専用のFBです。
COBOTTA PRO用ロボットコントローラのソフトウェアバージョンが1.9.* 以降の場合に使用できます。
ID : 1220