
ID : 426
CPMode
機能
CP補間モード設定を変更します。
解説
CP補間モード設定を変更します。
CP補間モードについて
CP補間モードというのは、CP動作時における動作時間の調整方法の種類のことです。
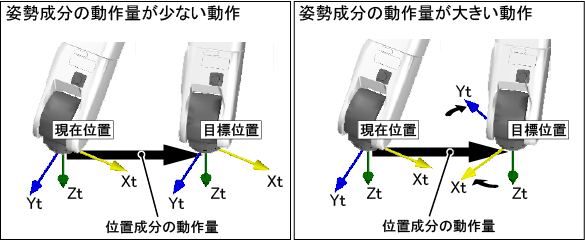
ロボット動作の成分を大きく2つに分けると、姿勢成分と位置成分に分けられます。
ロボットが動作する際、ロボットコントローラは、現在位置から目標位置までにかかる動作時間を、姿勢成分と位置成分の各成分で算出します。それらの動作時間から実際の動作時間を調整する方法がいくつかあります。その調整方法により、CP補間モードは下記のように分けられます。
- 設定値 : 0 "回転動作依存"
- 姿勢成分と位置成分の各動作時間のうち、どちらか長い方が実際の動作時間になります。
- 設定値 : 1 "速度一定" (デフォルト)
-
位置成分の動作時間が実際の動作時間となります。ただし、姿勢成分の動作量が大きく、姿勢成分の動作速度を上限まで上げても、位置成分の動作時間に間に合わない場合があります。その場合は、姿勢成分の動作速度を上限まで上げた時の、姿勢成分の動作時間が実際の動作時間になります。
姿勢成分の動作速度の上限は、速度設定(外部速度 * 内部速度)に比例します。そのため、同じ動作でも、下記のような場合があります。
- 速度設定が低いときは、姿勢成分の動作時間が位置成分の動作時間に間に合う。
- 速度設定が高いときは、姿勢成分の動作時間が位置成分の動作時間に間に合わない。
その結果、速度設定が低い方が、実際の動作時間が短くなる場合があります。
- 設定値 : 2 "速度一定(互換)"
- 設定値 : 1の時と基本的に同じですが、姿勢成分の動作時間が位置成分の動作時間に間に合わない場合、実際の動作時間は、設定値 : 1の時より短い時間、もしくは、同等となります。
変更方法
CP補間モードの変更は、CPModeコマンドによる方法と、パラメータを変更する方法の2つがあります。
CPModeコマンドで変更した場合、ロボットコントローラの電源を再立ち上げすると、CP補間モードは元の設定に戻ります。
CP補間モードを設定するパラメータは、ユーザパラメータの"TCP速度設定切替"です。パラメータを変更した場合、ロボットコントローラの電源を再立ち上げしても、CP補間モードは元の設定に戻りません。
関連項目
注意事項
- ロボット軸の制御権の取得が必要です。
- CP補間モードを変更するとロボットの動作速度が変わる可能性があります。
用例
'!TITLE "デンソーロボットプログラム"
Sub Sample_CpMode
TakeArm Keep = 1
CpMode 0
End SubID : 426