
ID : 2396
机器人本体的电气配线、气动配管方法
参考以下示例,安装机器人前端安装的夹治具、工具的电气配线、气动配管。
- 应使气动配管和I/O电缆的长度适当
- 应对配线外部进行保护
- 应使用固定带或固定夹固定电缆
- 应使用螺丝固定头部的D-sub连接器
- 不应让气动配管和用户配线的中直径超过φ11
在机器人本体上安装配线、配管固定用的撑条时
处理配线、配管的影像图
安装配管、配线时,请参考下图,使配管、配线呈缓和的弧形。
LPH-040A1时
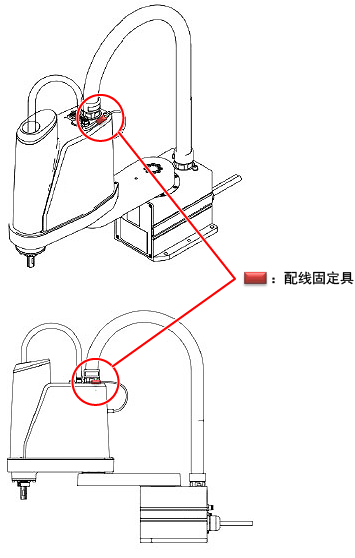 |
LPH-060A1、LPH-070A1时
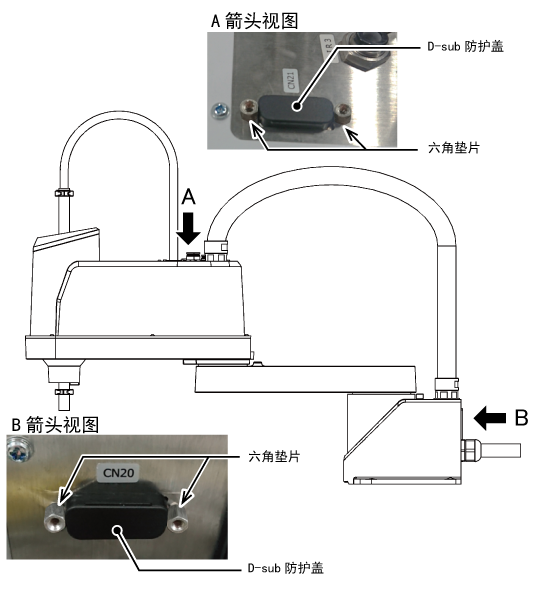
LPH-060A1、LPH-070A1没有配线固定件。
如下图所示,CN21连接器和CN20连接器上附有D-sub盖子。使用CN21连接器和CN20连接器 时,请拆掉D-sub盖子后使用。
 |
注意安装撑条时,在1轴和2轴初始设定的动作范围内,撑条或配线、配管与机器人可能发生干扰。发生干扰时,更改软件限位并缩小动作范围后再使用。
ID : 2396