
ID : 18196
变更第1轴的机械末端
VMB系列机器人出厂时,设计机械末端使第1轴的行程为±170°。
追加机械限动器并将变更第1轴的机械末端称作机械末端变更。
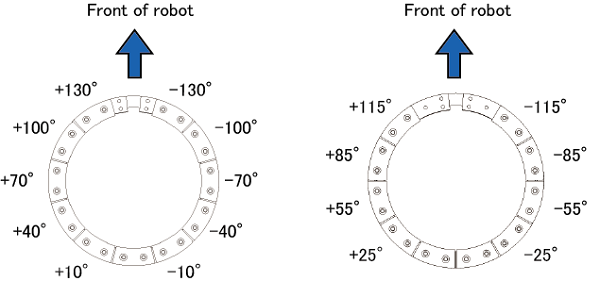
如果使用可变机械限动器(选件),就可以在两个方向以15°为单位限制第1轴的行程。
请根据希望的可动范围,变更可变机械限动器的位置。
- 上限 : +10° ~ +130°
- 下限 : -130° ~ -10°
构件
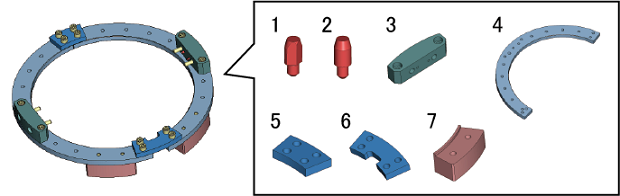
- 定位销钉(菱形)(个数 : 2)
- 定位销钉(圆形)(个数 : 4)
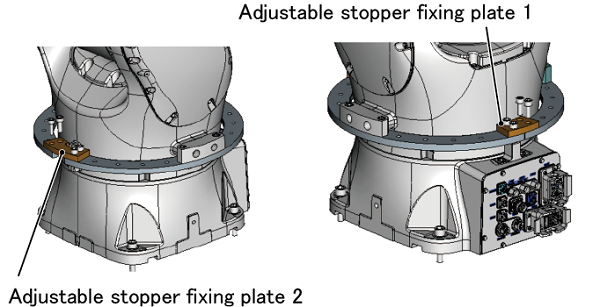
- 可变限动器用板1(个数 : 2)
- 可变限动器用板2(个数 : 2)
- 可变限动器用固定板(个数 : 1)
- 可变限动器用固定板2(个数 : 1)
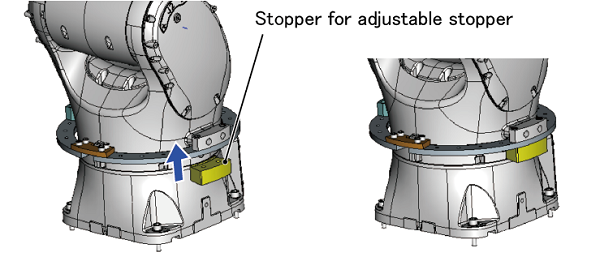
- 可变限动器用限动器(个数 : 2)
- 内六角螺栓 M12 × 45、三价铬酸盐(个数 : 12)
- 内六角螺栓 M12 × 30、三价铬酸盐(个数 : 8)
安装步骤
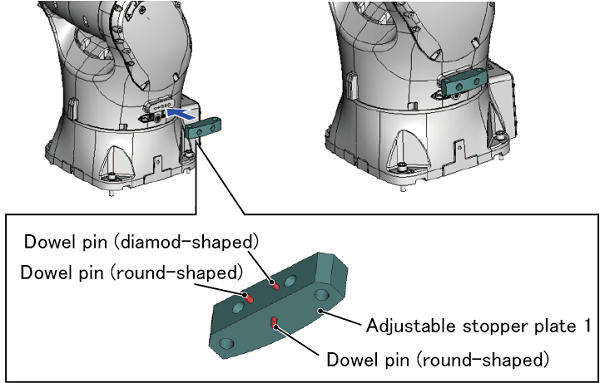
1
将定位销(菱形)和定位销(圆形)插入可变限动器用板1,固定在下图的位置。
内六角螺栓(共计4个) |
M12 × 45 |
|---|---|
| 安装扭矩 | 42.2Nm±20% |
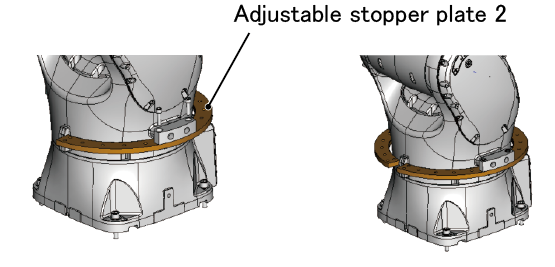
2
将可变限动器用板2临时固定至在STEP1固定的可变限动器用板1。
另一侧也一样临时固定。
内六角螺栓(共计4个) |
M12 × 45 |
|---|---|
| 安装扭矩 | 临时固定 |
3
使用在STEP2固定的可变限动器固定板2,固定可变限动器用板2。另一机电也使用可变限动器用固定板进行固定。
内六角螺栓(共计8个) |
M12 × 30 |
|---|---|
| 安装扭矩 | 42.2Nm±20% |
4
正式紧固在STEP2临时固定的螺栓。
| 安装扭矩 | 42.2Nm±20% |
|---|
5
将可变限动器用限动器固定在任意场所。
按15°为刻度留出螺丝孔。请根据需要调节可变限动器用限动器的安装位置。
内六角螺栓(共计4个) |
M12 × 45 |
|---|---|
| 安装扭矩 | 42.2Nm±20% |
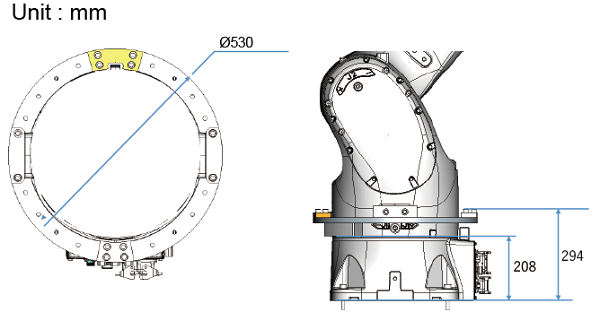
外形尺寸
ID : 18196