
ID : 10869
叉车用附加装置
辅助VMB系列机器人叉车搬运的选配附加装置。
使用后,请将附加装置从机器人本体拆除。
构件
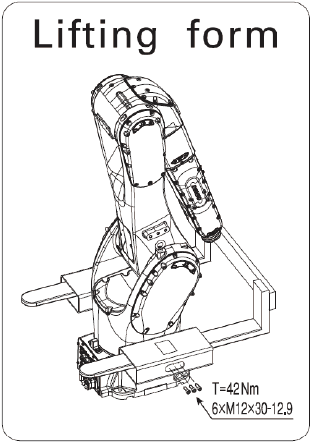
- 叉车用附加装置(个数:2)
- 内六角螺栓M12×30 强度区分12.9(个数:6)
机器人的姿势
搬运机器人时调整平衡姿势后进行搬运。
每种变化搬运时比较平衡的机器人姿势如下表所示。
VMB-2515
| 轴编号 | 角度[deg] |
|---|---|
| J1 | 0° |
| J2 | -13° |
| J3 | 170° |
| J4 | 0° |
| J5 | 0° |
| J6 | 0° |
VMB-2518
| 轴编号 | 角度[deg] |
|---|---|
| J1 | 0° |
| J2 | -10° |
| J3 | 170° |
| J4 | 0° |
| J5 | 0° |
| J6 | 0° |
尺寸及安装图
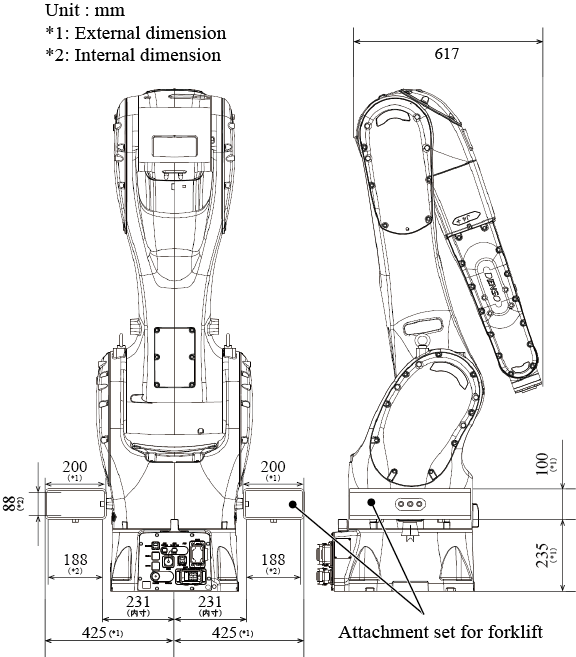
*外径尺寸:附加装置的外表面尺寸、内径尺寸:附加装置的内表面尺寸
*附加装置 (钢管)的厚度:6mm
| 紧固扭矩 | 42±8Nm |
|---|
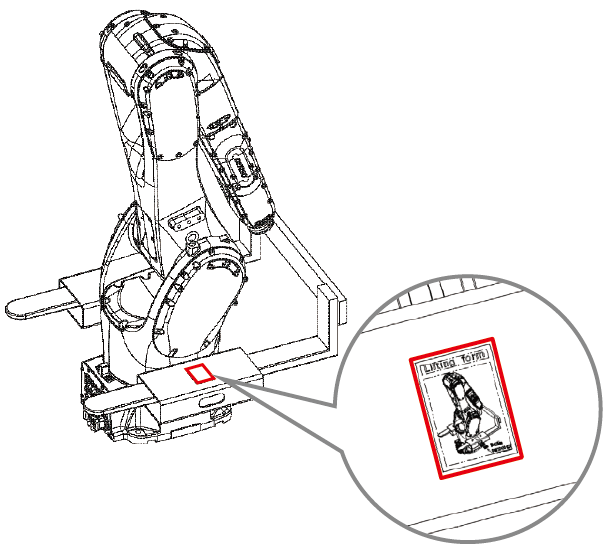
上升标签
用叉车搬运机器人本体时,请参照以下标签。
标签粘贴位置
ID : 10869