
ID : 10687
系统构成图
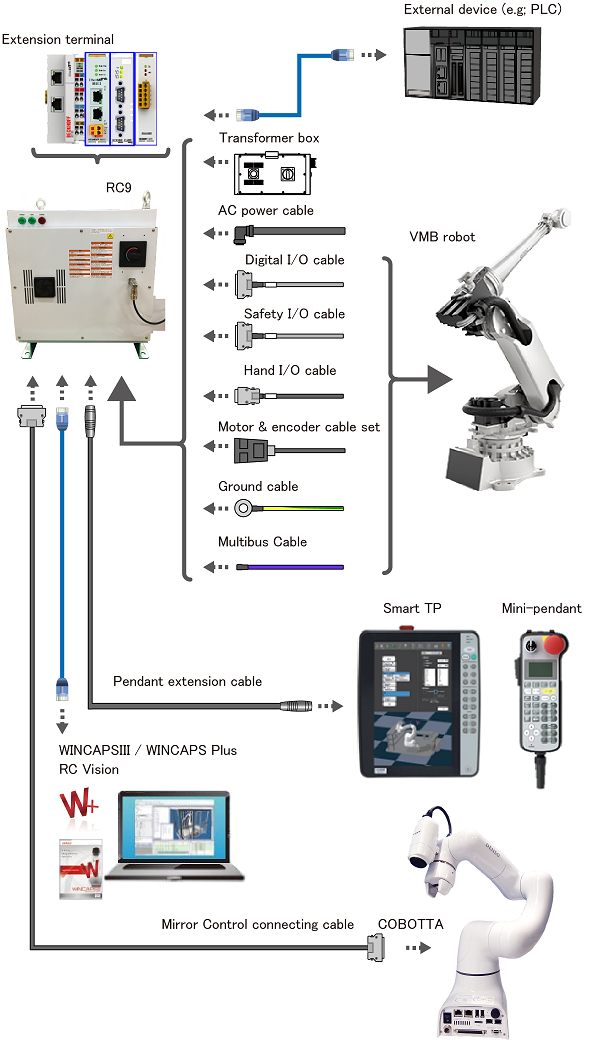
VLA机器人的系统构成图如下图所示。
图下记载有各设备的简单说明。
标准包装品
- VLA机器人本体
- 根据客户创建的机器人程序动作的机器人。
- RC9
- 搭载机器人控制所需功能及高速处理性能的机器人控制器。固件也可提供RC9。
- 接地线
- 连接机器人本体时使用的接地线。连接至机器人本体和机器人控制器。VLA系列机器人通过RC9进行接地。
必须的选件
- AC电源电缆
- 这是给RC9供电的电缆。
- Safety I/O电缆
- 汇总安全用信号的电缆。连接机器人控制器和机器人本体。
- 主体间电缆组件
- 连接机器人控制器和机器人本体的电缆。包含电机电缆和编码器电缆。
选项
- 电源变压器箱
- 确保可在使用国家电压下使用机器人的设备。
- Digital I/O电缆
- 汇总机器人用信号的电缆。连接机器人控制器和机器人本体。
- Hand I/O 电缆
- 汇总机器人机械臂所安装工具用信号的电缆。连接机器人控制器和机器人本体。
- 教导器延长电缆
- 智能TP及小型教导器用教导器延长电缆。
- 镜像控制连接电缆
- 使用镜像控制功能时使用的电缆。
- 多通电缆
- 进行现场总线信号的通信时使用的电缆。
- 智能TP
- 用于操作机器人或创建机器人程序。
- 小型教导器
- 用于操作机器人或创建机器人程序。
- WINCAPS III
- 在程序上执行机器人编程和模拟的软件。
- WINCAPS Plus
- 通过和WINCAPS III同时使用,为每个设计导入维护等场景提供最佳应用程序的软件。
- RC Vision (EVP2)
- 是专门为“拾取&放置”设计的无程序图像处理应用程序。
- 扩展端子
-
BECKHOFF公司制造的应用程序。
现场网络子局端子可使用以下软件。
- TwinCAT3 PLC
- TwinCAT3 HMI
- TwinCAT3 OPC UA
客户准备品
- PC
- 用于操作机器人或创建人程序。
请使用OS为Windows的PC。 - Ethernet电缆
- 在使用电脑时或与外部设备连接时使用。
ID : 10687