
ID : 10343
连接方法
基本思路
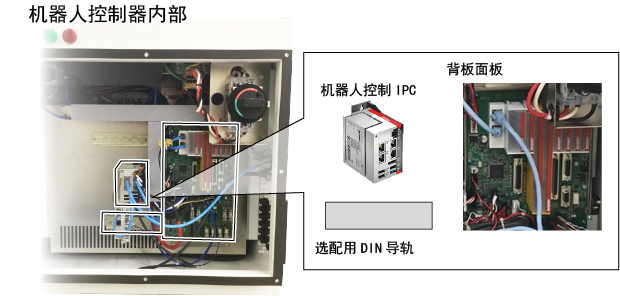
即使连接任意I/O选件,也需要EtherCAT接头端子。
机器人控制器内部具有选配用DIN导轨,在此处安装EtherCAT接头端子。
安装EtherCAT接头端子后,如下图所示连接EtherCAT电缆和背板面板电源线束(单)。
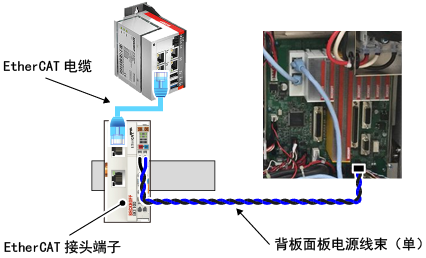
如在订购机器人时指定EtherCAT接头端子的组装选件,在完成上图连接的状态下出厂。
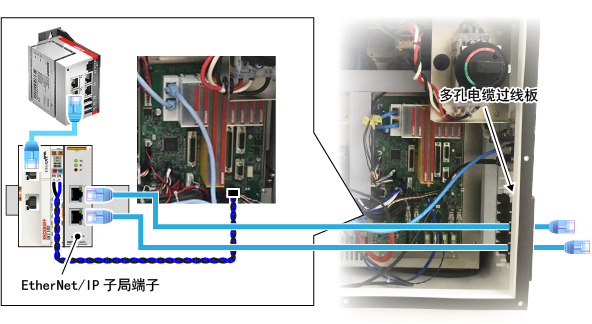
之后,将任意I/O选件连接至EtherCAT接头端子的右侧。下图是连接EtherNet/IP子局端子时的例子。
连接到EtherNet/IP子局端子的电缆穿过多孔电缆过线板,拉出到机器人控制器之外。
不可内置于机器人控制器中时
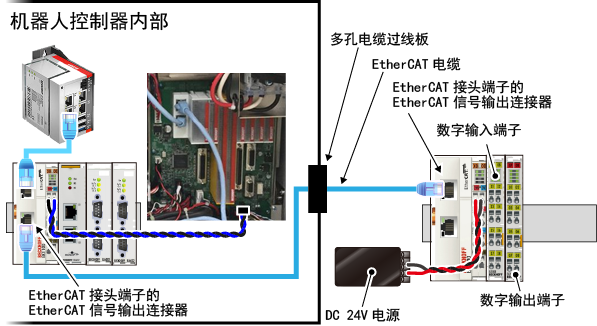
I/O选件数超过可内置于机器人控制器的数量时
下图为数字输入端子和数字输出端子不可内置时的例子。
另行准备EtherCAT接头端子用于不可内置的I/O选件,如下图所示连接。
ID : 10343