全文检索
指令检索
选择菜单
查阅本书的方法与操作方法
Detailed Description of Commands (By Functions)
机器人动作创建基本
智能TP操作指南
小型教导器操作指南
WINCAPSIII指南
错误列表
Parameter List
Description of Each Function
VM系列机器人的产品信息
VM系列机器人的安装
VM系列机器人的维护
安全注意事项
VL系列机器人的维护
VL系列机器人的产品信息
VL系列机器人的安装
MC9系列的产品信息
MC9系列的维护
MC9系列的安装
PacScript的详细说明
ID跳过
AND
OR
文字大小
小
中
大
HOME
机器人动作创建
机器人动作创建基本
使机器人运行
基础知识
机器人位置的表示方法
关于臂、肘、手腕的形态
蜷起、伸直
<< 向前
下一页 >>
安全注意事项
产品信息
设置
机器人动作创建
维护
付録
ID : 10106
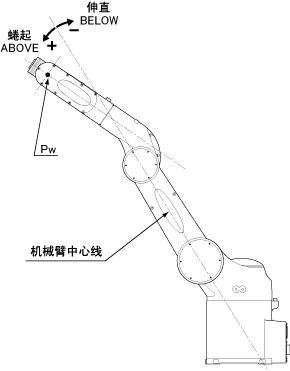
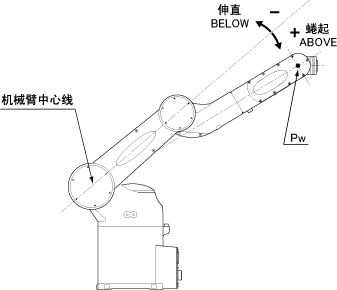
蜷起、伸直
对于臂中心线,在“Pw”的位置位于+侧时是蜷起形态可移动的范围,位于-侧时是伸直形态可移动的范围。
蜷起、伸直的界限(反手时)
蜷起、伸直的界限(正手时)
ID : 10106
<< 向前
下一页 >>
返回顶部