
ID : 10053
基本指令说明
通过简单的动作程序示例对创建程序时所需的指令进行说明。
程序示例
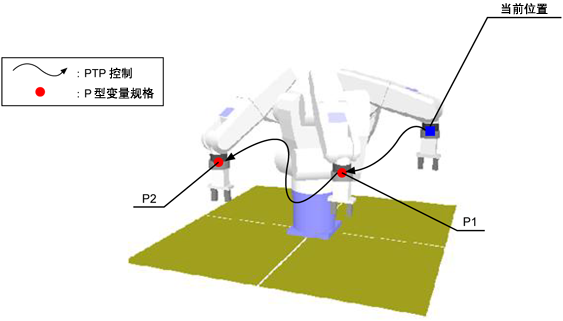
通过PTP控制按顺序使机械臂从当前位置动作至P1、P2。
程序文件名PRO1.pcs
'!TITLE "电装机器人程序"
’程序标题(便于理解内容的任意注释)
Sub Main '定义主进程
TakeArm Keep = 0 '获取机械臂控制权
Speed 100 '机械臂移动速度(内部速度)100%
Move P, P1 '指定坐标 向P1移动
Move P, P2 '指定坐标 向P2移动
GiveArm '释放机械臂控制权
End Sub '停止程序关于指令格式
- 特殊符号“[ ]”可省略,根据需要记述。
- 无需区分英文字母的大小写。
创建程序文件名
新建项目时,在程序编辑视窗中输入[文件名]。此为程序文件名,在视窗上部与扩展名(.pcs)显示。从其它程序调出时指定该程序文件名。
程序名的定义(Sub Main 指令)
说明
执行程序名及变量等程序时所需的项目要在执行之前进行定义。
尤其是定义程序名时,必须在程序的最初有效行中进行定义。
记述主过程时,在开头行记入“Sub Main”。
格式
Sub Main
停止程序(End Sub指令)
说明
如果执行该指令,则根据程序结束动作。
格式
End Sub
获取机械臂控制权(TakeArm指令)
说明
执行多个程序时,仅具有控制权的程序可操作机器人的机械臂。使用操作机器人机械臂的动作命令时,务必使用TakeArm命令以获取机械臂控制权。
格式
TakeArm[机械臂组编号][ Keep = Keep选件设定值]
释放机械臂控制权(GiveArm指令)
说明
释放当前获取的机械臂控制权。执行中程序获取的机械臂控制权将在任务结束时自动释放,因此输入End Sub时可省略。将控制权转让给执行中的其它程序时使用GiveArm语句。
格式
Givearm
指定机械臂移动速度(Speed指令)
说明
使用百分数(1~100)指定内部速度。外部速度与内部速度的关系如下所示。
实际的机械臂移动速度(%)= 外部速度(%)× 内部速度(%)
如量变更内部速度,内部加速度及内部减速度也会随之变更。
- 外部速度是指通过操作机器或PLC等设定的速度。
- SPEED命令在执行下一SPEED命令前有效。
格式
Speed 速度
注释的描述(Rem指令)
说明
在程序中描述注释。
将“’”(单引号)或者“Rem”以后,换行之前输入的字符串被识别为注释,不编译或执行。
格式
'[注释] (或者Rem[注释])
ID : 10053