
ID : 11239
設定
スレーブターミナルの装着
CC-Linkスレーブターミナルの装着方法は、「I/Oオプション」の「接続方法」を参照してください。
ロボットコントローラの機能拡張
CC-Linkスレーブターミナルを使用するには、ロボットコントローラにて機能拡張が必要です。
機能拡張を行うには、スマートTPまたはWINCAPSIIIで、ライセンスキーをコントローラに登録します。詳細は、「ライセンス登録」を参照してください。
組付・ライセンス形態での購入の場合、機能拡張した状態で出荷します。
通信パラメータの設定
構成機器や環境に合わせ、通信パラメータの設定を行ってください。
| 実施項目 | 内容 |
|---|---|
| ロボットコントローラの設定 | WINCAPSIIIでデバイスの設定を行います。 デバイスの選択と、入出力サイズ、IPアドレスを設定します。 |
| マスタの設定 | WINCAPSIIIで行ったデバイスの設定と同じパラメータをマスタ側で設定します。 |
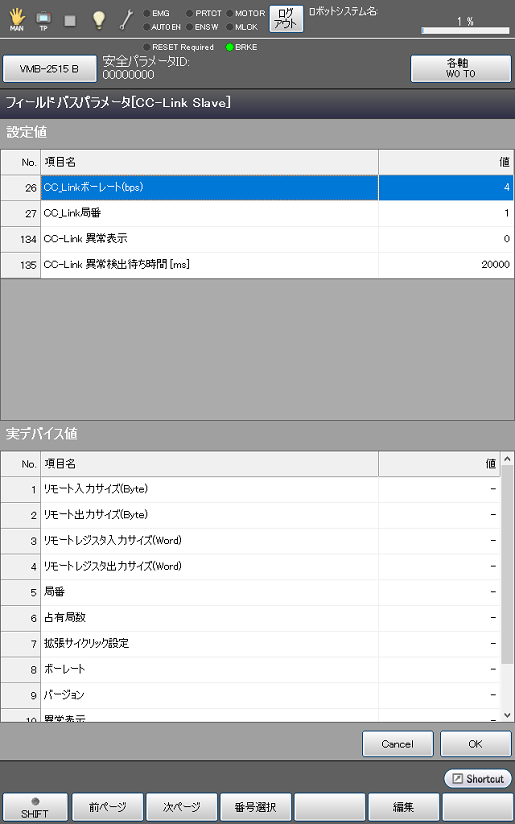
設定の確認
CC-Linkスレーブターミナルのデバイス情報、およびロボットコントローラで設定した情報を以下のスマートTP操作で確認できます。
基本画面-[F4 I/O]-[F6 補助機能]-[F4 フィールドバスパラメータ]
ID : 11239
- このページに関連する情報
- ロボットコントローラの設定
- マスタの設定