
ID : 10641
本体間ケーブルの接続
ロボットコントローラとロボットは本体間ケーブルで接続します。
本体間ケーブルには、動力用とエンコーダ用の2種類があります。
- 動力用 300 mm以上
- エンコーダ用 230 mm以上
本体間ケーブルの曲げR(内径)は、下記に示す幅を確保してください。過度の曲げは断線の原因となります。
ロボット側の接続
ロボットコントローラ側のコネクタがすでに接続されている場合は、ロボットコントローラの電源が切れていることを確認してから作業を行ってください。
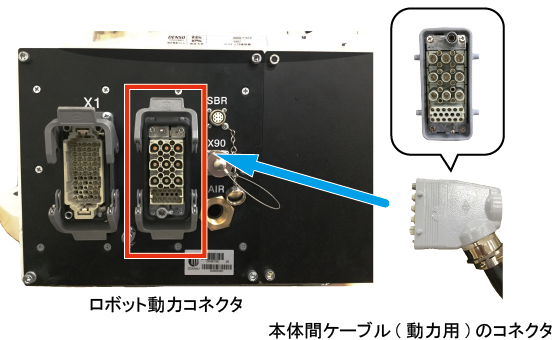
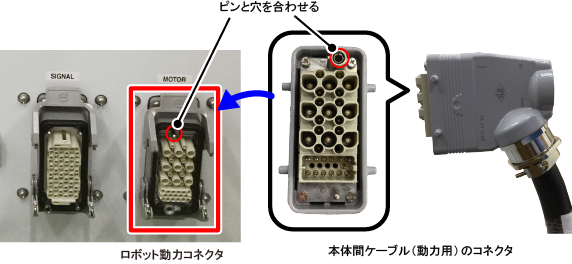
本体間ケーブル(動力用)の接続
1
本体間ケーブル(動力用)のコネクタとロボット動力コネクタの左右の向きを合わせます。
逆向きにすると挿入できません。
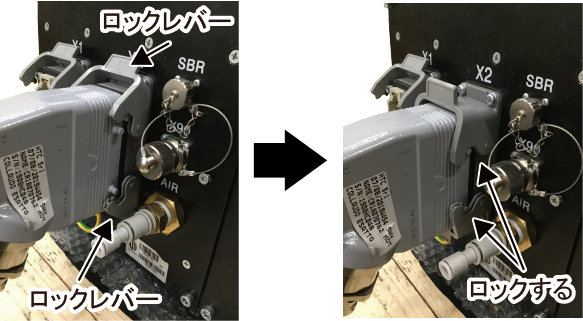
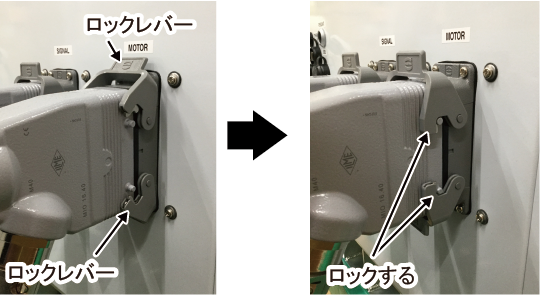
2
本体間ケーブル(動力用)のコネクタをロボット動力コネクタにまっすぐ挿入し、2つのロックレバーを動かしてロックします。
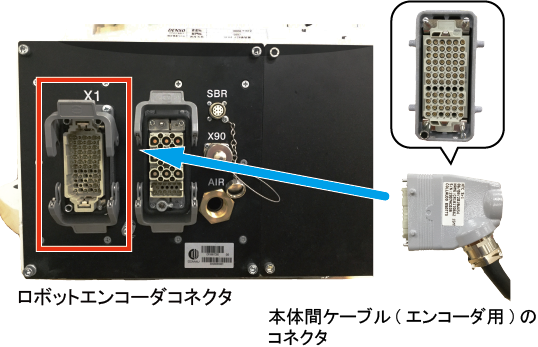
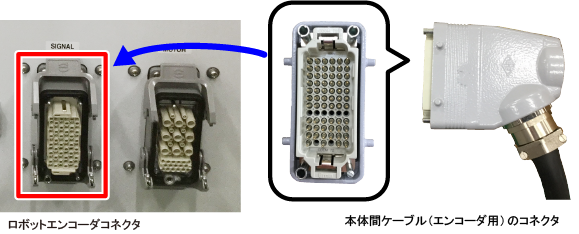
本体間ケーブル(エンコーダ用)の接続
1
本体間ケーブル(エンコーダ用)のコネクタとロボットエンコーダコネクタの左右の向きを合わせます。
逆向きにすると挿入できません。
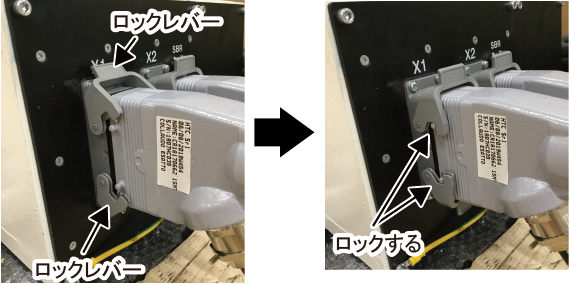
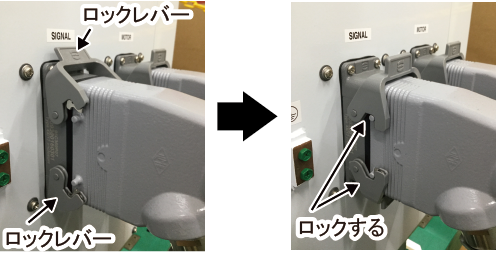
2
本体間ケーブル(エンコーダ用)のコネクタをロボットエンコーダコネクタにまっすぐ挿入し、2つのロックレバーを動かしてロックします。
ロボットコントローラ側の接続
ロボットコントローラの電源が切れていることを確認してから作業を行ってください。
本体間ケーブル(動力用)の接続
1
本体間ケーブル(動力用)のコネクタとロボット動力コネクタの上下の向きを合わせます。
逆向きにすると挿入できません。
2
本体間ケーブル(動力用)のコネクタをロボット動力コネクタにまっすぐ挿入し、2つのロックレバーを動かしてロックします。
本体間ケーブル(エンコーダ用)の接続
1
本体間ケーブル(エンコーダ用)のコネクタとロボットエンコーダコネクタの上下の向きを合わせます。
逆向きにすると挿入できません。
2
本体間ケーブル(エンコーダ用)のコネクタをロボットエンコーダコネクタにまっすぐ挿入し、2つのロックレバーを動かしてロックします。
ID : 10641