
ID : 10342
WINCAPSIIIによる設定方法
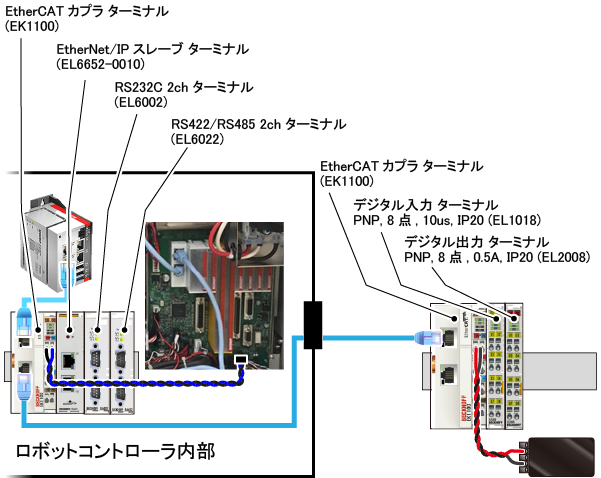
デジタル I/O 拡張ターミナルを使用する場合
デジタル I/O 拡張ターミナル (デジタル入力ターミナル、デジタル出力ターミナル、デジタル入出力ターミナルのいずれか) を使用する場合、接続構成を[RC9 DIO設定]にて設定する必要があります。
下図のような構成を例にして説明します。
1
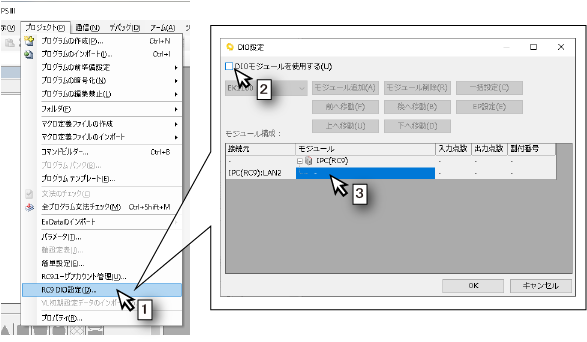
- [プロジェクト]メニューから[RC9 DIO設定]を選択します。
- [DIO設定]ウィンドウの[DIOモジュールを使用する]にチェックを入れます。
- "モジュール構成"枠の"IPC(RC9)"のすぐ下のセルをクリックします。このセルには、ロボット制御IPCに直接接続しているI/Oモジュールを入力します。
2
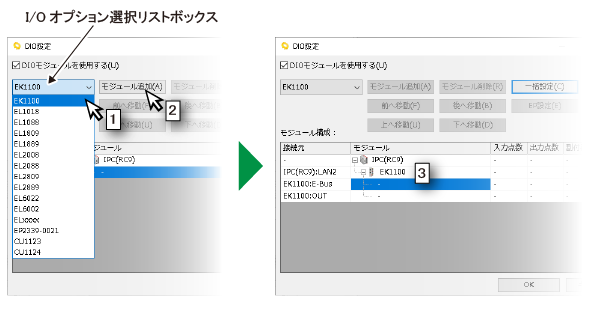
- ロボット制御IPCに直接接続しているI/OモジュールはEK1100なので、[I/Oオプション選択リストボックス]から"EK1100"を選択します。
- [モジュール追加]ボタンをクリックします。
- EK1100が追加されます。EK1100に接続するI/Oモジュールは、EK1100の下に入力します。
3
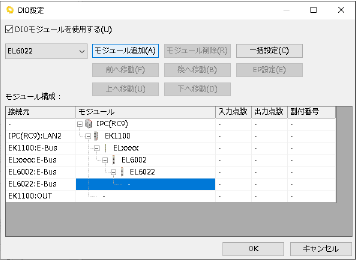
フィールドネットワークスレーブターミナルの場合は、[I/Oオプション選択リストボックス]から"ELxxxx"を選択し、モジュール構成に追加します。下図はEL6652-0010(ELxxxx)、EL6002、EL6022を追加し終えた状態です。これで、ロボットコントローラ内部の構成は完成しました。
4
ロボットコントローラの外にあるEK1100は、ロボットコントローラ内部のEK1100のEtharCAT信号出力コネクタと接続しています。この場合、"モジュール構成"枠では、"EK1100:OUT"のところに、ロボットコントローラの外にあるEK1100を追加します。
- "EK1100:OUT"のセルを選択します。
- [I/Oオプション選択リストボックス]から"EK1100"を選択し、[モジュール追加]ボタンをクリックします。
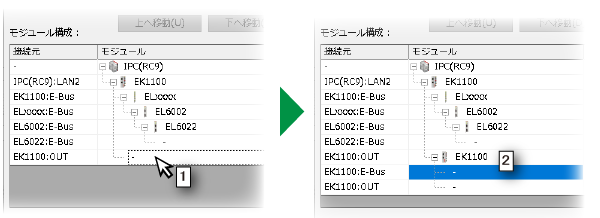
5
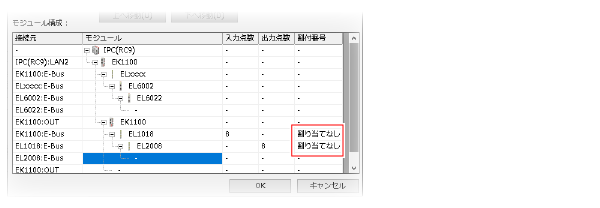
ロボットコントローラの外にあるEK1100に、EL1018とEL2008を追加します。デジタル入力ターミナルおよびデジタル出力ターミナルの場合、下図のように"割当番号"列に"割り当てなし"と表示されます。
6
デジタル入力ターミナルおよびデジタル出力ターミナル(以降 "デジタルターミナル")の場合、ポート番号の割当てを設定する必要があります。
- "割り当てなし"をダブルクリックし、割り当てるポート番号の範囲を選択します。
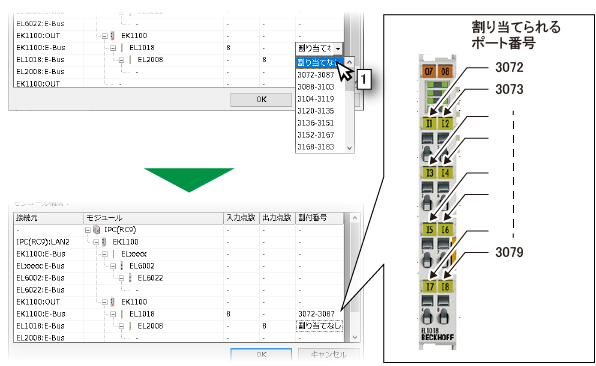
上図では、EL1018に3072~3087の範囲を割当てました。ポート番号はデジタルターミナルの端子番号の小さい値から割付られます。したがって、上図の場合、EL1018のI1端子には3072が割付けられ、I8には3079が割付けられます。
ポート番号の範囲は16点ずつ区切られています。その範囲に8点のデジタルターミナルを割当てた場合、残りの8点は使用できないポート番号となります。上図の場合、3080~3087は使用できないポート番号となります。
7
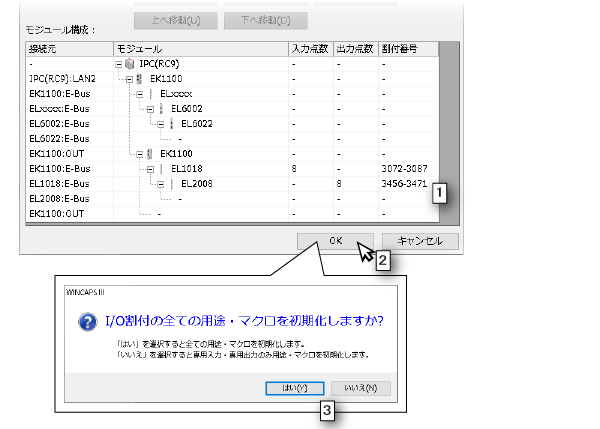
- EL2008のポート番号の割当てを設定します。これで、全ての接続構成が完成しました。
- [DIO設定]ウィンドウの[OK]ボタンをクリックします。
- I/O割付の初期化をするかどうか選択するウィンドウが表示されるので、「はい」か「いいえ」のどちらかをクリックします。
8
設定した内容をロボットコントローラに送信します。
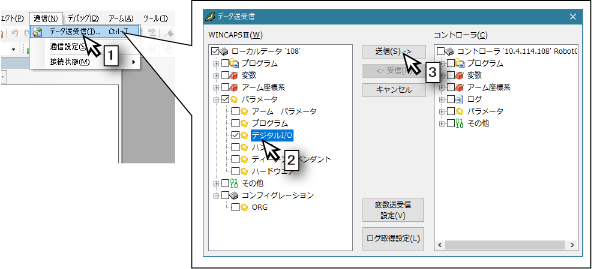
- [通信]メニューから[データ送受信]を選択します。
- [WINCAPSIII]枠の[パラメータ]を開き[デジタルI/O]にチェックを入れます。
- [送信]ボタンをクリックします。
9
- [RC9にログイン]ウィンドウが表示されるので、ロボットコントローラに設定しているユーザの内、ユーザーレベルが "プログラマ" 以上のアカウントを選択します。
- パスワードを入力します。
- [ログイン]ボタンをクリックします。
- 送信が完了した旨を伝えるウィンドウが表示されたら[OK]ボタンをクリックします。
- ロボットコントローラの電源を再投入します。

以上で終了です。
ID : 10342