全文検索
コマンド検索
マニュアルを選択してください
本書の見方と操作方法
コマンドリファレンス
ロボット動作作成の基本
スマートTP操作ガイド
ミニペンダント操作ガイド
WINCAPSIIIガイド
エラーリスト
パラメータリスト
各機能の詳細説明
VMBシリーズロボットの製品情報
VMBシリーズロボットのセットアップ
VMBシリーズロボットのメンテナンス
安全上のご注意
VLAシリーズロボットのメンテナンス
VLAシリーズロボットの製品情報
VLAシリーズロボットのセットアップ
MC9シリーズの製品情報
MC9シリーズのメンテナンス
MC9シリーズのセットアップ
IDジャンプ
AND
OR
文字サイズ
小
中
大
HOME
ロボット動作作成
ロボット動作作成の基本
ロボットを動かす
基礎知識
ロボットの位置の表し方
腕・ひじ・手首の形態について
アバッブ・ビロー
<< 前へ
次へ >>
安全上のご注意
製品情報
セットアップ
ロボット動作作成
メンテナンス
付録
ID : 10106
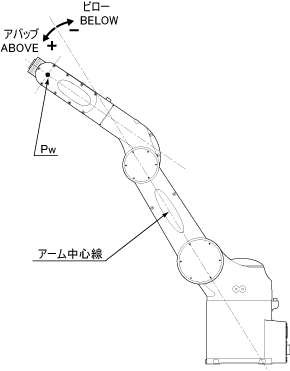
アバッブ・ビロー
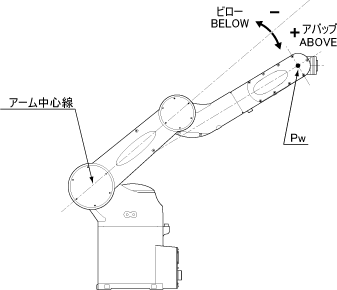
アーム中心線に対して、「Pw」の位置が+側にある場合がアバッブ形態で移動可能な範囲、-側にある場合がビロー形態で移動可能な範囲です。
アバッブ・ビローの境界(レフティーの場合)
アバッブ・ビローの境界(ライティーの場合)
ID : 10106
<< 前へ
次へ >>
ページトップへ