メカニカルインタフェース座標系
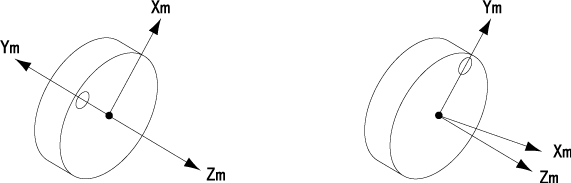
下図に示すような、フランジ中心を原点とする3次元直交座標をメカニカルインタフェース座標系といいます。
メカニカルインタフェース座標系のX軸をXm、Y軸をYm、Z軸をZmと表現します。
下図はVMBの例です。
他のロボットのY軸が通る穴は、φ5H7になります。
|
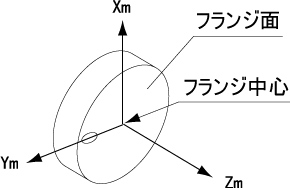
Zm : フランジ面に垂直な軸
Ym : フランジ中心からΦ6H7の中心を通る軸
Xm : Zm、Ymに垂直な軸
|
メカニカルインタフェース座標系は、ワーク座標系とは違って、フランジが回転すると座標も一緒に回転します。
 HOME
HOME