
ID : 9488
ロボットプログラムの作成の流れ
WINCAPSIIIを使ったプログラムの作成から動作検証までの流れは以下のとおりです。
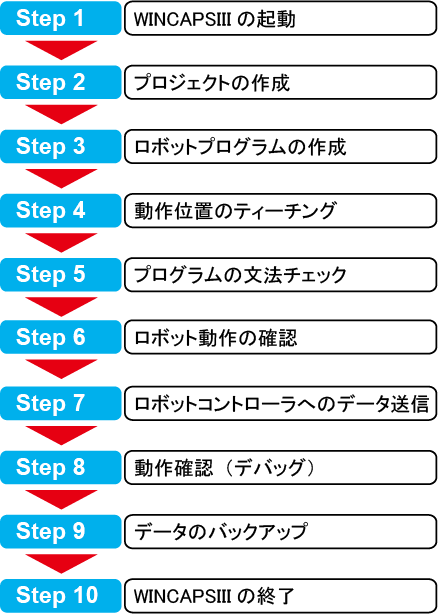
STEP1:WINCAPSIIIの起動
WINCAPSIIIを起動します。
詳しくは、「起動と終了」を参照してください。
STEP2:プロジェクトの作成
使用するロボットに合わせてプロジェクト(必要なデータ)を作成します。
詳しくは、「プロジェクトの作成」を参照してください。
STEP3:ロボットプログラムの作成
専用エディタを使って、ロボットの動作プログラムを作成します。
詳しくは、「プロジェクトの概要」を参照してください。
STEP4:動作位置のティーチング
アーム3Dビューで仮想ロボットを動かして、動作位置をティーチングします。
詳しくは、「アーム3Dビュー」を参照してください。
簡易モデリングや3Dデータをインポートして、3D画面上に周辺設備をセッティングし、ロボットの動作範囲と設備との干渉を確認することができます。
STEP5:プログラムの文法チェック
作成したプログラムの文法チェックを行います。
エラーがある場合、出力ウィンドウに行番号とエラー内容が表示されます。
詳しくは、「プログラムの文法チェック」を参照してください。
STEP6:ロボット動作の確認
作成したプログラムの動きを、シミュレーション機能を使って確認します。
修正が必要な場合は、STEP3以降を繰り返し、意図した通リロボットが動作することを確認します。
STEP7:ロボットコントローラへのデータ送信
ロボットコントローラと接続して、ロボット動作に必要なデータをロボットコントローラに送信します。
詳しくは、「ロボットコントローラとの通信」を参照してください。
STEP8:動作確認(デバッグ)
ロボットコントローラで実際にロボットプログラムを動作させ、プログラムの流れやロボットの動作範囲と周辺設備との干渉などを確認します。不具合があった場合は、プログラムを修正して、正しく動作するまでこの作業を繰り返します。
STEP9:データのバックアップ
ロボットコントローラ内のデータを、WINCAPSIIIプロジェクトデータとして保存します。
詳しくは、「データの送受信」を参照してください。
STEP10:WINCAPSIIIの終了
WINCAPSIIIを終了します。
詳しくは、「起動と終了」を参照してください。
ID : 9488