
ID : 7579
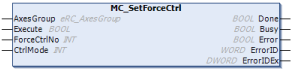
MC_SetForceCtrl
力制御機能(コンプライアンス機能)を有効にします。
| グラフィック表示 | FBカテゴリ |
|---|---|
 |
動作 |
入出力変数
| 変数名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | 不可 | ||
|
||||
入力変数
| 変数名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| Execute | BOOL |
|
FALSE | 不可 |
|
||||
| ForceCtrlNo | INT | 1 ~ 10 | 1 | 可能 |
|
||||
| CtrlMode | INT | 0,1,2,3 | -1 | 可能 |
|
||||
*1: RC9ソフトウェア専用の機能です。
*2: RC8ロボットコントローラシリーズ専用の機能です。
出力変数
| 変数名 | データ型 / 説明 |
|---|---|
| Done | BOOL |
|
|
| Busy | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | WORD |
|
|
| ErrorIDEx | DWORD |
|
機能説明
力制御機能は、ロボットの力を制御する機能です。機能には以下の4種類があります。
機種によって使用できる機能が異なります。詳細は、各ユーザーマニュアルをご確認ください。
| コンプライアンス機能 | ロボットやそれに付随する工具などの振舞いが、外部からの作用に対して柔軟に対応することができる機能 |
|---|---|
| 力センサ有コンプライアンス機能 | 力センサを使って、ロボットの手先の押し付け力を一定に制御する機能 |
| 外力倣い制御機能 | ロボット停止中にロボットやそれに付随するツールなどが、外部からの作用に対して柔軟に対応する機能です。 |
| 力センサ有ロバストコンプライアンス機能 | 力センサ有コンプライアンス機能に比べて設定するパラメータが少なく、簡単にロボット手先の押し付け力を一定に制御することができます。 |
注意事項
このFBを実行するには、FBカテゴリ"動作"のFBを実行可能状態にしておく必要があります。
FBカテゴリ"動作"のFBを実行可能状態にするにはFB"MC_Power"を使用します。
ID : 7579