
ID : 5666
外部TCP機能
機能概要
通常、ロボットを動作させるときには、手先の位置をどこに移動させるか、ということを指定します。外部TCP機能では、ワーク座標系の原点をどこに移動させるか、ということを指定します。
実際には、外部TCP機能では、ワーク座標系の原点は固定させて使用するので、ロボットの手先が相対的に動作することとなります。
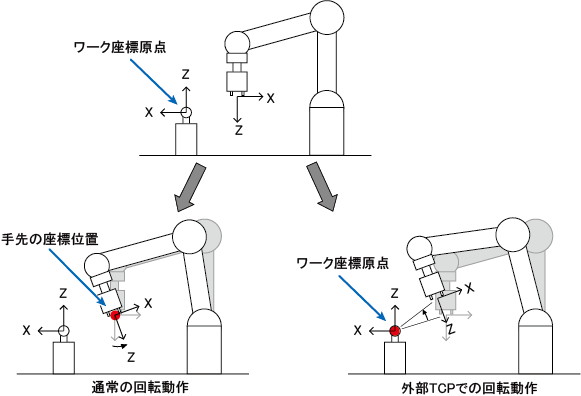
例えば、現在位置での姿勢を回転させる動作では、通常は、手先の座標原点(ツール座標系の原点)を中心に動作します。外部TCP機能では、ワーク座標系の原点を中心に動作します。
この機能はVer.1.7.*から使用可能です。
外部TCP機能は、下記のような動作をCP動作(円弧は除く)で行うときに、教示点を少なくすることができます。
- ロボットにワークを持たせ、設備に固定したリュータでワークのバリ取りをする。
- ロボットにワークを持たせ、設備に固定したシールガンでワークにシール塗布をする。
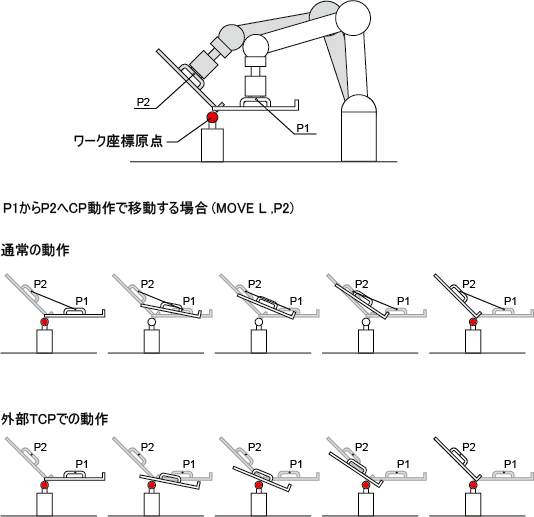
例えば、下図のように、ロボットに持たせたワークの表面をワーク座標原点がなぞるような動作をさせたい場合を考えます。通常の動作では、P1とP2の2点だけだと、途中で、ワークの表面とワーク座標原点が離れてしまいます。外部TCP動作では、P1とP2の2点だけで、ワークの表面をワーク座標原点がなぞる動作を実現できます。
使用方法
機能の有効化
外部TCP機能を使用するには、オプション管理画面でライセンスキーを入力する必要があります。
入力方法については、“ライセンス登録”を参照してください。
ライセンスキーの入手方法については、“オプション機能とライセンス”を参照してください。
ワーク座標の属性の変更
ワーク座標の設定画面で、ワーク座標を選択し、属性を“標準”から“固定工具(Fix)”に変更します。
変更方法については、ティーチングペンダント操作ガイドの“ワーク座標の表示・設定”を参照してください。
ワーク座標の切替え
動作モード選択画面で、“固定工具(Fix)”属性を持つワーク座標に切替えます。該当のワーク座標が選択されている状態で動作させると、外部TCP機能が働きます。
切替え方法については、ティーチングペンダント操作ガイドの“動作モード選択画面の表示・変更”を参照してください。
プログラムでの指定
プログラム内で一時的に、ワーク座標の属性変更やワーク座標の切替えを行うことができます。
プログラムでの設定は、コントローラ電源OFF時に保存されません。
プログラム内で一時的に属性を変更する場合
Workコマンドを使用します。
プログラム内で一時的にワーク座標を切替える場合
ChangeWorkコマンドを使用します。
使用上の注意
- 外部TCP機能を使用するにはライセンスが必要です。
- WORK0(ベース座標)には属性を付加できません。
- ワーク座標系の属性を“固定工具(Fix)”に設定していても、補間方法にPTPを指定して動作させると、外部TCP動作となりません。 その場合は、通常の動作となります。
- 付加軸は、外部TCP動作をしません。
- 外部TCP機能では、円弧補間動作はできません(エラーになります)。
- 外部TCP機能では、Arriveコマンド、WaitMotionコマンドは使用できません(エラーになります)。
- 外部TCP動作では、特異点回避機能を有効にしていても、5軸が0度近くを通過する際、4軸が大きく回転しエラーが発生する場合があります。
- 外部TCP動作では、姿勢制御をOFFにしていても、姿勢制御がONの状態で動作します。
- コンベアトラッキングと外部TCP機能は併用できません。
- 外部TCP動作における自由曲線補間動作の経由点を、TOOL動作で、X軸周り、Y軸周り、またはZ軸周りの回転動作のみを用いて教示すると、エラー[8120141D 経路の分割が必要です]が発生することがあります。エラー発生の場合は、経由点の位置、姿勢の見直しを行ってください。
ID : 5666