
ID : 4897
付加軸の位置取込方法
付加軸の位置を取り込む方法は以下の2種類存在します。
付加軸の位置はどちらの方法でも、J型変数に取込みます。
J型変数を用いて、付加軸とロボット軸の位置を取得する方法
目標位置を取り込む際に、ロボット軸と付加軸を同じアームグループに登録することで、ロボット軸と、付加軸の現在位置をJ型変数の同じ変数番号に同時取込みができます。
変数取込み手順
1
アームグループを設定します。
基本画面 - [F2 アーム] - [F12 保守] - [F10 軸設定] - [F1 アームグループ]を押します。
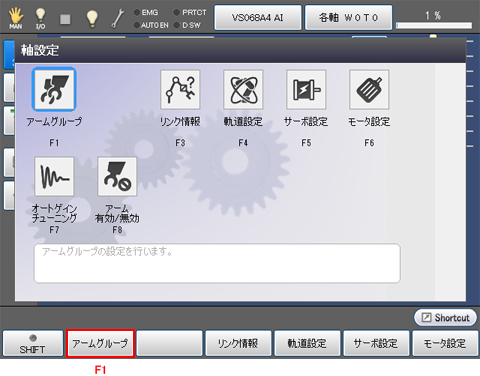
「アームグループ設定」画面が表示されます。
2
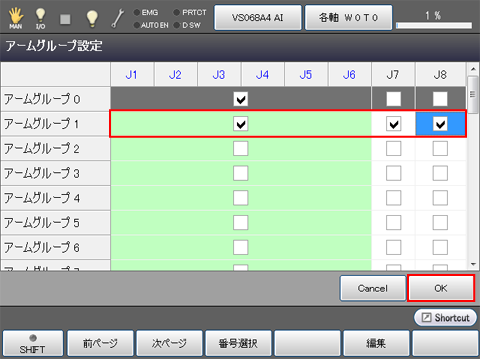
設定したいアームグループの軸番号にチェックを入れます。
以下の例は、アームグループ1に"J1~J6"と、"J7、J8"を設定しています。
アームグループの設定が完了後、[OK]を押します。
3
コントローラの電源を再投入します。
4
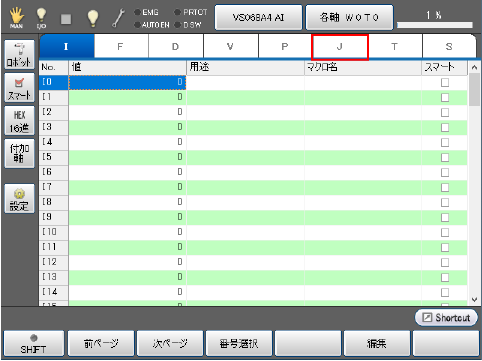
基本画面 - [F3 変数] - [J型変数]タブを選択します。
5
[付加軸]を押します。
以下の項目が切替ります。
- アームグループが画面下部に表示されます。

6
[Group -]を押します。
アームグループのリストが表示されますので、使用するアームグループ番号を選択します。
以下の例では、[Group 1]を選択しています。

7
ロボットおよび、付加軸を目標の位置へ移動します。
8
位置を取込む変数を選択し、[F6 位置取込]を押します。
以下の例では、"J0"を選択しています。

9
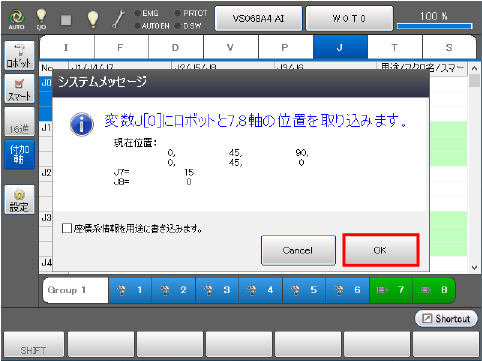
変数を取込むかのシステムメッセージが表示されますので、よければ[OK]を押します。
[Cancel]を押すと、変数は取込まれません。
J0に、ロボット軸と付加軸の現在位置が取り込まれます。
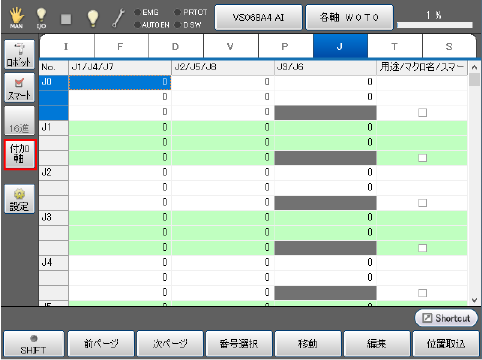
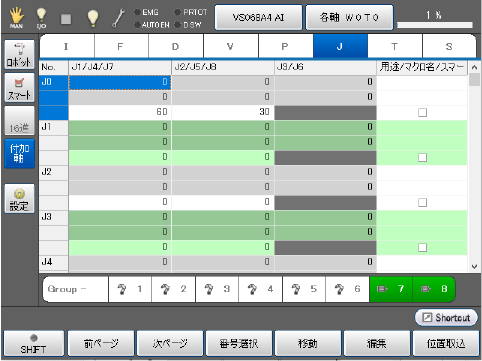
取込まれた変数は、以下のように表示されます。

アームグループリスト部分の、ロボット軸を無効にすることで、ロボット軸の現在位置を取得せずに、付加軸の位置のみを取得することも可能です。
以下の例は、ロボット軸のどれか(J1~J6)を押して、ロボット軸部分を青から白に変更した状態です。この状態では、ロボット軸は無効です。

この状態で位置取り込みを押すと、取り込み確認画面が現れます。
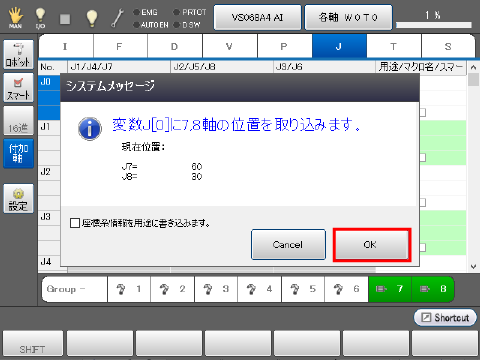
[OK]を押すと、付加軸の位置のみを取得します。
J型変数と、P型変数を用いて、付加軸とロボット軸の位置を合わせて取得する方法
目標位置を取り込む際に、ロボット軸と付加軸を同じアームグループに登録することで、ロボット軸の現在位置をP型変数に、付加軸の現在位置のみをJ型変数の同じ変数番号に同時取込みができます。
変数取込み手順
1
アームグループを設定します。
基本画面 - [F2 アーム] - [F12 保守] - [F10 軸設定] - [F1 アームグループ]を押します。
「アームグループ設定」画面が表示されます。
2
設定したいアームグループの軸番号にチェックを入れます。
以下の例は、アームグループ1に"J1~J6"と、"J7、J8"を設定しています。
アームグループの設定が完了後、[OK]を押します。
3
コントローラの電源を再投入します。
4
基本画面 - [F3 変数] - [P型変数]タブを選択します。
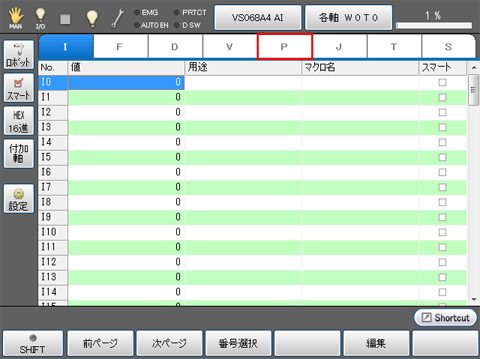
5
[付加軸]を押します。

以下の項目が切替ります。
- No.の表示が、"P0~"から"P0、J0~"に変更されます。
- 変数を選択した時に表示される範囲が変更されます。
- アームグループが画面下部に表示されます。

6
[Group 0]を押します。
アームグループのリストが表示されますので、使用するアームグループ番号を選択します。
以下の例では、[Group 1]を選択しています。

7
ロボットおよび、付加軸を目標の位置へ移動します。
8
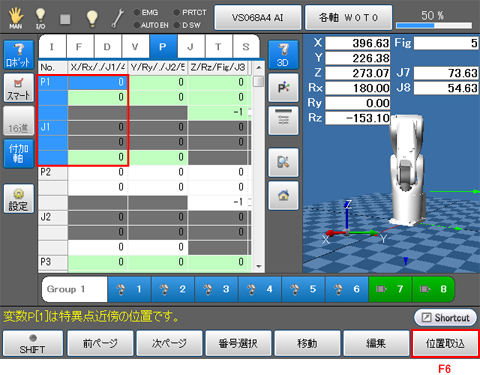
位置を取込む変数を選択し、[F6 位置取込]を押します。
以下の例では、"P1、J1"を選択しています。
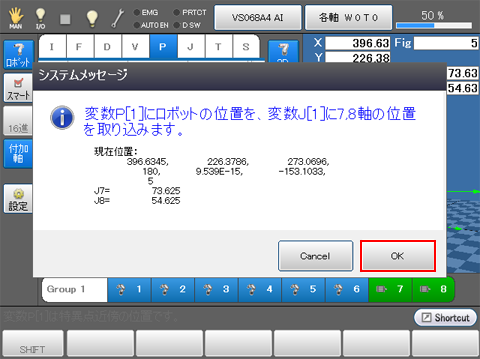
9
変数を取込むかのシステムメッセージが表示されますので、よければ[OK]を押します。
[Cancel]を押すと、変数は取込まれません。
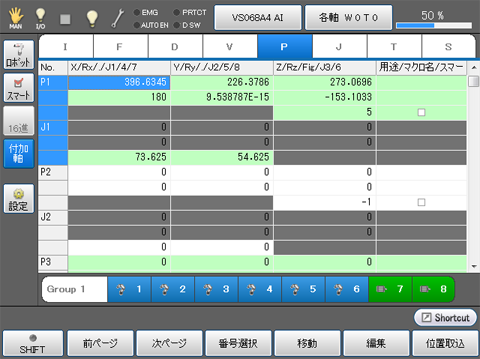
取込まれた変数は、以下のように表示されます。
ID : 4897