
ID : 4644
挟み込まれ・非常停止時、モータOFFで各軸を動かすには
HMシリーズのブレーキ解除方法を下表に示します。
- ブレーキ解除操作を行うと、Z軸が落下あるいは上昇することがあります。けがおよび設備損傷の恐れがないことを確認の上、作業を行ってください。
- 第3軸 (Z軸) を動かす際は、ラック部の歯切りされた部分に指などが引っかからないように注意してください。
| 機種 | ブレーキ付軸 | ブレーキ解除方法 |
|---|---|---|
| UL仕様以外の機種 | 第3軸 (Z) |
「ティーチングペンダント/ミニペンダント操作によりブレーキ解除」 注:詳細の操作方法は操作ガイドの「アーム保守機能の表示・設定」を参照してください。 |
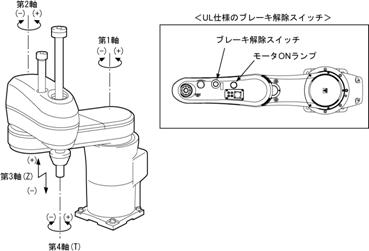
| UL仕様 |
第1軸 (J1) 第2軸 (J2) 第3軸 (Z) |
コントローラ電源ONで、ブレーキ解除スイッチを押している間、全軸のブレーキが解除されます。 注:UL仕様では、ティーチングペンダント/ミニペンダント操作によるブレーキ解除ができません。 |
非常停止時の各軸の動かし方
挟み込まれ・非常停止時、モータOFFのまま各軸を動かす方法を下表に示します。
| 軸 | UL仕様以外の機種 | UL仕様 |
|---|---|---|
| 第1軸 (J1) | 手でアームを押して動かす。 |
ブレーキ解除スイッチを押しながら全軸のブレーキ解除し、手で該当軸を動かす。 |
| 第2軸 (J2) | ||
| 第3軸 (Z) |
|
|
| 第4軸 (T) | 手で軸を回す。 | 手で軸を回す。 |
|
||
手でロボットを動かす際は、プラスチックカバー以外の部分を持って行ってください。
ID : 4644