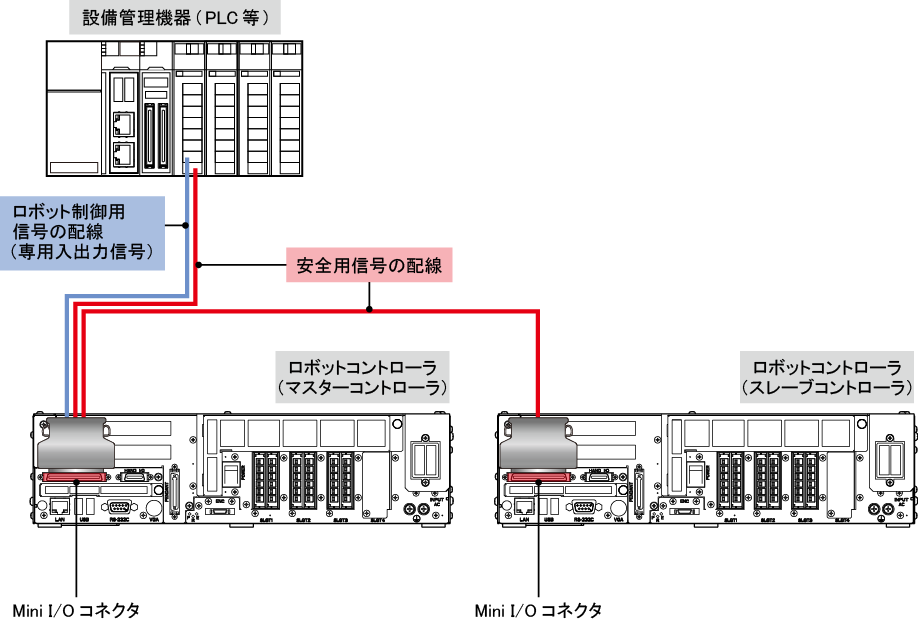
Mini I/Oと設備管理機器との配線
専用入出力信号をMini I/Oを介して通信する場合、安全用信号とともにMini I/Oコネクタへ配線します。
次の図を参照してください。
| 安全用信号の配線 |
詳細は、"ロボットコントローラの必要条件と安全用信号の配線"を参照してください。 |
| 専用出力信号 |
信号によって、マスターコントローラとスレーブコントローラの両方の状態の論理積もしくは論理和が出力されるものがあります。
専用出力信号の詳細は次のとおりです。
| 信号名 |
出力される状態 |
| Mini I/O専用モード用信号 |
ロボット運転中 |
マスター |
| ロボット異常 |
OR |
| ロボット初期化完了 |
AND |
| 自動モード |
マスター |
| 運転準備完了 |
AND |
| バッテリ切れ警告 |
OR |
| コマンド処理完了 |
マスター |
| コンティニュスタート許可 |
| CPU正常 |
それぞれの状態 |
| 安全回路の信号 |
ペンダント非常停止出力 |
| デッドマンSW出力(イネーブルSW出力) |
STOモニタ出力
(RC8Aのみ) |
自動モード相互監視出力
(RC8Aのみ) |
コンタクタ接点モニタ出力
(RC8のみ) |
| パラメータ設定によって使用可能な信号 |
停止処理実行中出力 |
OR |
| ロボットコントローラ立ち上げ完了 |
| ロボット動作中出力(指令値) |
| ロボット動作中出力(エンコーダ値) |
| バッテリー交換時期出力 |
| モータOFF実行中出力 |
- 上の表の"出力される状態"には、次の内容を記載しています。
| 状態の内容 |
表記 |
| マスターコントローラの状態とスレーブコントローラの状態の論理積 |
AND |
| マスターコントローラの状態とスレーブコントローラの状態の論理和 |
OR |
| マスターコントローラの状態 |
マスター |
| マスターコントローラとスレーブコントローラのそれぞれの状態が、それぞれのロボットコントローラから出力される |
それぞれの状態 |
- パラメータ設定によって使用可能な信号については"汎用出力ポートを利用した状態出力"を参照してください。
|
