
ID : 2022
既存のプロジェクトから協調用プロジェクト作成
マスタ、スレーブ共に、既存のWINCAPSIIIプロジェクトを指定して協調用プロジェクトを作成します。
既存プロジェクトは、実機から取得したものを選択してください。IOデバイスや変数の設定値が異なるプロジェクトを、「協調用プロジェクトの一括送受信」で送信すると、実機の設定値が上書きされます。
協調制御使用時にマスタとスレーブの使用条件パラメータ”再起動時のパス動作継続設定”の値が異なる、あるいは全て1に設定されている場合は、同期動作中のコンティニュー起動時に目標位置に同期して動作しない場合があります。その為、マスタとスレーブの使用条件パラメータ”再起動時のパス動作継続設定”を全て0に設定して下さい。
1
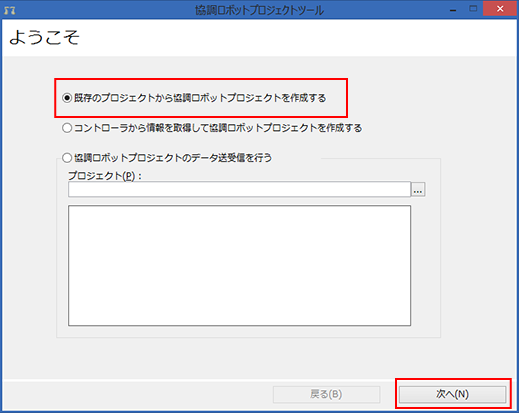
「既存プロジェクトから協調用ロボットプロジェクトを作成する」を選択します。
[次へ]ボタンを押します。
2
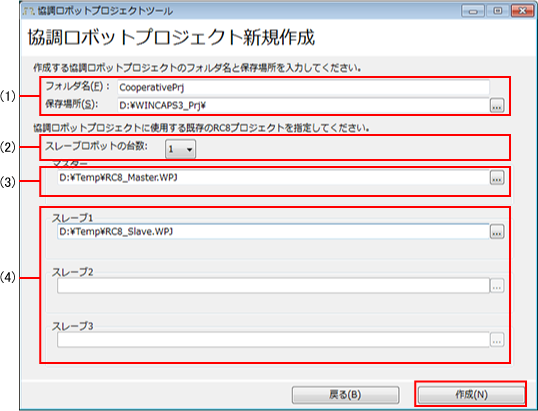
(1)作成する協調プロジェクトのフォルダ名と保存場所、(2)スレーブロボットの台数、(3)マスタコントローラのプロジェクト、および(4)スレーブコントローラのプロジェクトを指定します。
指定後、[作成]ボタンを押します。
3
[OK]ボタンでウインドウを閉じます。
ID : 2022