
ID : 1987
ワールド座標
機能概要
ワールド座標は、ユーザが指定する原点を基準とした座標系で、複数台のロボットに対する位置指定を共通の座標系で行うことができます。
ワールド座標の原点を設備原点とすることで、各ロボットに対し設備座標での位置指定ができます。
| 従来 | ロボットベースを原点とする座標系で位置を指定。エリア、ワーク等もすべてロボットベース基準
|
|---|---|
| ワールド座標 | ユーザ指定の原点を基準とする座標系で位置を指定。エリア、ワーク等もすべてワールド座標基準(ツールを除く)
|
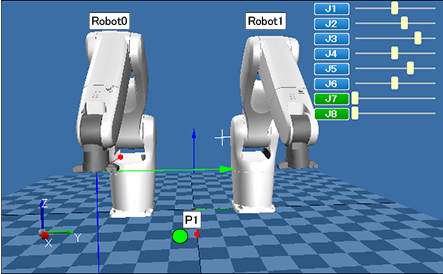
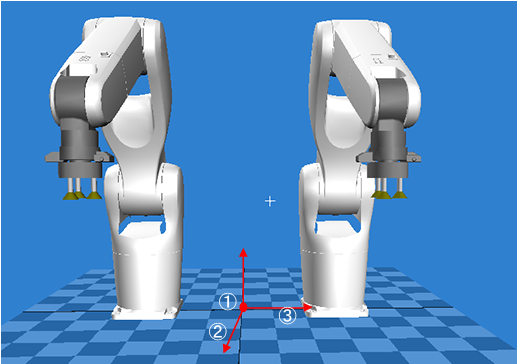
下図の例では、Robot0でもRobot1でも、ワールド座標系でのP1の値は同じですので、プログラミングは容易です。
プログラム例
Robot0.Move P, P1 'ロボット0がP1に動作
Robot1.Move P, P1 'ロボット1がP1に動作
協調機能でのワールド座標
協調機能では、最初に、全てのロボットに対し、ワールド座標系から見たベース位置(ベース座標)を指定しておく必要があります。
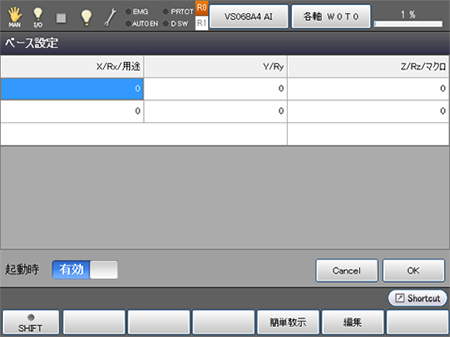
ティーチングペンダントによるベース座標の指定
ワールド座標上でのベース座標の設定方法は「直接入力」と「簡単教示」があります。
| 直接入力 | (X,Y,Z,Rx,Ry,Rz)を直接指定します。
|
|---|---|
| 簡単教示 | 基準に対して下記3点を教示し、ベース座標を自動計算します。 (1)座標原点 (2)X軸方向 (3)XY平面の点
|
プログラム中でのベース座標の指定
Baseコマンドを使用します。
ID : 1987