
ID : 1259
MC_ChangeScene
現在のシーンとサブシーンを変更します。
| グラフィック表示 | FBカテゴリ |
|---|---|
|
動作 |
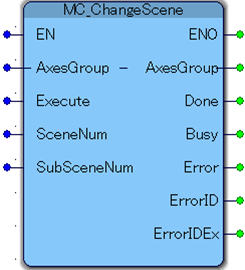
入出力変数
| 変数名 | データ型 | 有効範囲 | 入出力条件 |
|---|---|---|---|
| AxesGroup | eRC_AxesGroup | - | |
|
|||
入力変数
| 変数名 | データ型 | 有効範囲 |
|---|---|---|
| Execute | BOOL |
|
|
||
| SceneNum | INT | 0 ~ 9 |
|
||
| SubSceneNum | INT | 0 ~ 9 |
|
||
出力変数
| 変数名 | データ型 / 説明 |
|---|---|
| Done | BOOL |
|
|
| Busy | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | INT |
|
|
| ErrorIDEx | DINT |
|
機能説明
現在のシーンとサブシーンを変更します。
コマンド実行前に、指定したシーンのシーンパラメータ[シーン切替条件(位置)SafetyP番号]で設定したSafetyPの位置または領域に移動している必要があります。
コマンド実行時は、指定したシーンの以下のシーンパラメータの設定に応じて挙動が変わります。シーンパラメータに関しては、各機能の詳細説明の"シーンパラメータの設定" をご覧ください。
シーン切り変え条件(停止監視)
- 0 : 無効
- ロボットの停止を指令値で判定します。そのため、ロボットが動作している状態であってもシーンが変更される可能性があります。
- 1 : 有効
- ロボットの停止をエンコーダ値で判定します。そのため、ロボットが完全に停止していることを確認したあとに、シーンが変更されます。
注意事項
このFBを実行するには、FBカテゴリ"動作"のFBを実行可能状態にしておく必要があります。
FBカテゴリ"動作"のFBを実行可能状態にするにはFB"MC_Power"を使用します。
コマンド実行時に、指定したシーンのシーンパラメータ[シーン有効/無効設定]で値が[0 : 無効]に設定されているシーン番号を指定している場合は、エラーが発生します。
このコマンドを実行しているプログラムが初期化停止した場合は、自動モードではデフォルトシーンに、手動モードでは手動モードシーンに切り替わります。
COBOTTA PRO専用のFBです。
COBOTTA PRO用ロボットコントローラのソフトウェアバージョンが1.9.* 以降の場合に使用できます。
ID : 1259