
ID : 2388
机器人夹治具设计的注意事项(LPH)
设计机器人的夹治具时,请满足以下项目。未满足时,可能会发生故障。
如果不遵守机器人夹治具设计的注意事项,则机器人本体的各紧固部位发生松动、晃动,引起错位,还可能导致机器人的机械零件及机器人控制器破损。
夹治具质量
请将夹治具、工具(包括工件)总质量的最大值设计在机器人最大可搬运质量以下。
将配线、配管撑条等安装至机器人本体时,其撑条以及配线、配管的质量也包括在夹治具质量中。
| 夹治具、工具总质量的最大值 ≤最大可搬运质量 |
夹治具、工具总质量的最大值是用户设定的前端负载质量的值。还包括工件重量。
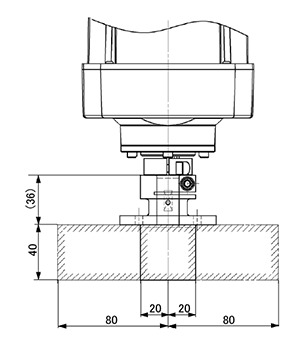
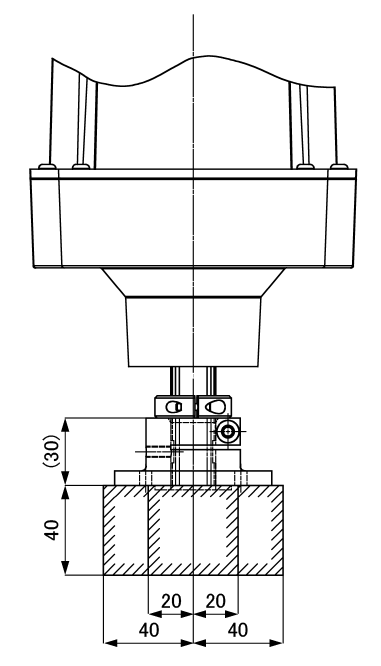
夹治具重心位置
在下图的范围内设计夹治具、工具(包括工件)的重心位置。
| LPH-040A1时 | LPH-060A1、LPH-070A1时 |
|---|---|
 |
 |
偏移量
请将夹治具、工具(包括工件)偏移量设计在机器人最大偏移量以下。
| 夹治具、工具的偏移量 ≤最大容许偏移量 (参照下图的图表) |
LPH-040A1时
<适用示例>
|
 |
LPH-060A1、LPH-070A1时
<适用示例>
|
 |
T轴旋转惯性力矩
请将夹治具、工具(包括工件)的T轴旋转惯性力矩设计在机器人的T轴最大容许惯性力矩以下。
| 夹治具、工具T轴旋转惯性力矩 ≤最大容许惯性力矩(包括工件重量) |
| 型式(模型) | 最大容许惯性力矩 |
|---|---|
| LPH-040A1 | 0.075kgm2 |
| LPH-060A1 | 0.023kgm2 |
| LPH-070A1 |
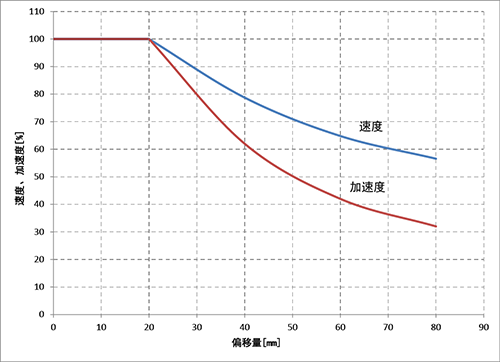
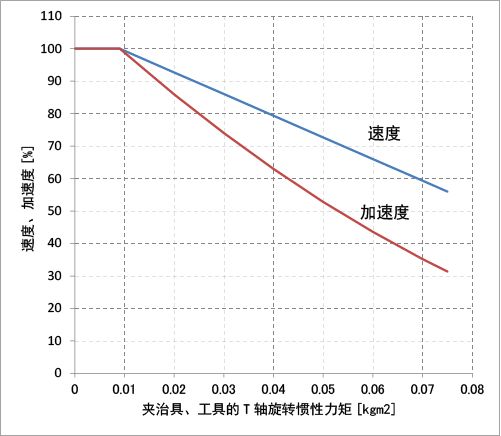
但是,LPH-040A1时,有时即使在最大容许許容惯性力矩以下,也需要按照夹治具、工具的T轴旋转惯性力矩的值限制速度和加速度。
关于相对夹治具、工具的T轴旋转惯性力矩的值的速度和加速度的限制值,请通过下图的图标求出。
速度和加速度均可分别设定,但是,未分别设定时,设定速度后,可通过以下公式设定加速度。
加速度 (%) = (速度 (%) /100) 2×100
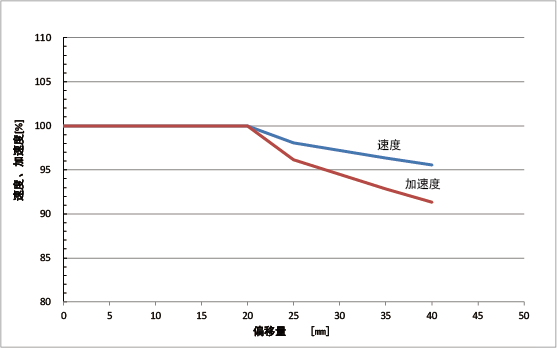
分别设定速度和加速度时,应在下图所示的范围内设定。
<适用示例>
|
 |
ID : 2388